https://habr.com/ru/post/508236/- Habr
- Python
- Машинное обучение
- Работа с видео
Данная статья является вольным переводом
моей статьи на Medium
Я детстве я любил играть на компьютере. Совсем маленьким я застал несколько игра на кассетном ZS Spectrum, однако настоящим открытием стали красочные DOS игры 90x годов. Тогда же и зародилось большинство существующих жанров. Немного поностальгировав, я решил вспомнить молодость и запустить одну из старых игр на эмуляторе Dosbox и был неприятно поражен гигантскими пикселями и низким разрешением. Хотя в крупнопиксельной старой графике может быть свое очарование, многих сейчас не устраивает такое качество.
Для повышения разрешения и избавления от угловатости в играх в настоящее время используются различные алгоритмы постпроцессинга и сглаживания (подробно можно почитать, например тут
zen.yandex.ru/media/id/5c993c6021b68f00b3fe919c/kak-rabotaet-sglajivanie-v-kompiuternyh-igrah-5c9b3e76d82a083cc9a0f1a7 ), но алгоритмы сглаживания приводят к всем ненавистной «мыльной» картинке, которая часто еще менее предпочтительна, чем угловатость больших пикселей.
При этом улучшение качества графики часто критично для геймеров. Перерисовка текстур для HD игре Heroes 3 заняла около полугода в 2014 году у компании Ubisoft и вызвало всплеск интереса к данной игре. Из недавних новостей — переиздание первой CNC в hd графике. Подробно можно увидеть рос интереса к переизданным в hd графике на google trends:
trends.google.com/trends/explore?date=2012-06-01%202020-06-25&q=%2Fm%2F056_97,%2Fm%2F065pfn
Не для каждой игры имеет смысл заморачиваться и переиздавать в высоком качестве — перерисовка текстур -занятие затратное. Но можно попробовать улучшить качество графики использую технологию суперразрешения (superresolution). Идея superresolution лежит в улучшении разрешения изображения путем дорисовки недостающих пикселей нейросетью на основании имеющихся данных. Сейчас достигнуты впечатляющие результаты, вызывающие ассоциацию со разобранной на мемы сценой улучшения изображения из фильм bladerunner
https://www.youtube.com/watch?v=hHwjceFcF2Q .
Технология superresolution улучшает визуальное восприятие картинки, например вот
github.com/tg-bomze/Face-Depixelizer, однако привносит новую информацию в изображение. И может быть использована для улучшения качества фильмов
,
. Однако большинство алгоритмов ресурсоемки, а мне хотелось создать скрипт для улучшения игры в реальном времени.
Немного теории
Все нижесказанное будет относиться к
сверточным нейросетям— подтипу нейросетей, использумому для работы с изображениями. Для начала рассмотрим, как работает нейросеть для решения задачи superresolution. Задача очень похожа на решение задачи
автоэнкодера . На вход сети необходимо подать изображение, на выходе получить такое же изображение. Однако автоэнкодеры обычно используют для решения задачи эффективного сжатия данных, поэтом особенностью их архитектуры является Bottleneck — бутылочное горлышко, то есть слой сети с небольшим количеством нейронов. Наличие такого слоя затставляет оставшиеся части обучаться для эффективного кодирования и раскодирования информации. Для обучения сетей superresolution разрешение высококачественного изображения сначала намеренно уменьшается и подается на вход нейросети. На выходе ожидается исходное изображение в высоком качестве. Задача superresolution определяет архитектуру используемых сетей:
обычно в них присутствует связь между входными и выходными данными (skip-connection), сильно ускоряющая обучение. Размер пикселя входных данных увеличивается и прибавляется к выходу сверточной сети. Таким образом, фактически не нужно обучать сеть превращать изображение в почти такое же. Нужно лишь обучить ее дорисовывать разницу между увеличенным при помощи увеличения размера пикселя и реальным изображением. Идея наличия skip connections различного уровня и через разное количество слоев чрезвычайно эффективна и привела к появлению класса сетей Residual Networks. Сейчас подобные связи используются почти во всех популярных архитектурах. Неплохой обзор state-of-art архитектур для решения задач superresolution можно посмотреть тут (https://github.com/krasserm/super-resolution ). Моей же задачей было создать нейросеть для решения задачи superresolution в реальном времени.
Сначала мной была выбрана архитектура edsr с 4 блоками (обычно используют более 16 слоев из блоков) ResNet c увеличением разрешения в 4 раза. Тут я частично воспользовался наработками из
github.com/krasserm/super-resolution и генератором данных из этого же проекта.
Общая архитектура сети показана на схеме. Каждый блок – изображение X*Y*N, где ширина соответствует числу каналов. Переходы – соответствуют сверткам 3x3 (в случае res блоков с последующей активацией ReLU для нелинейности). Шаг Upscaling – увеличение размерности за счет уплощения каналов.
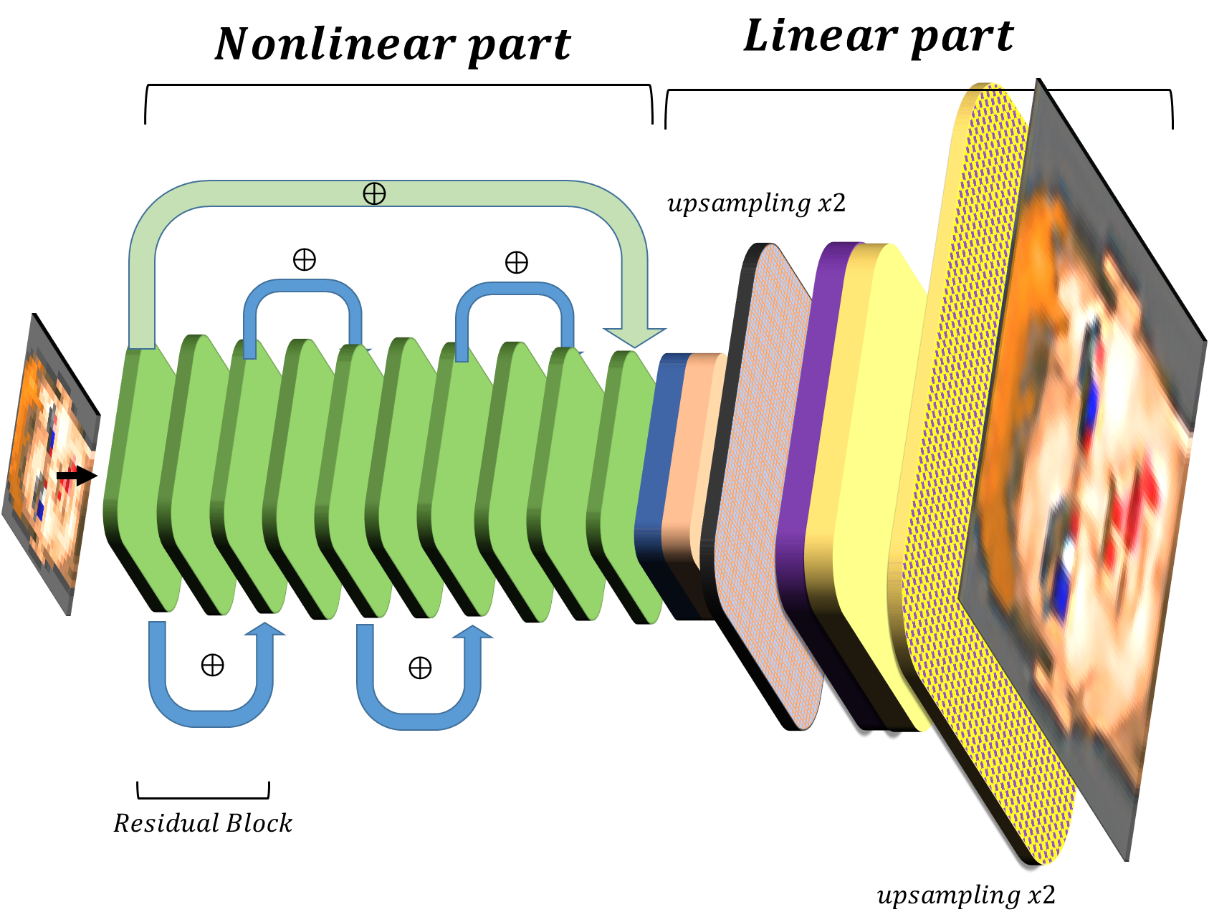
Если приглядеться к такой небольшой сети, то можно заметить, что последние блоки — линейные и наличие нескольких шагов upscaling неоправданно. Можно без потери качества заменить их на один слой с гораздо меньшим количеством фильтров без потери качества работы сети:
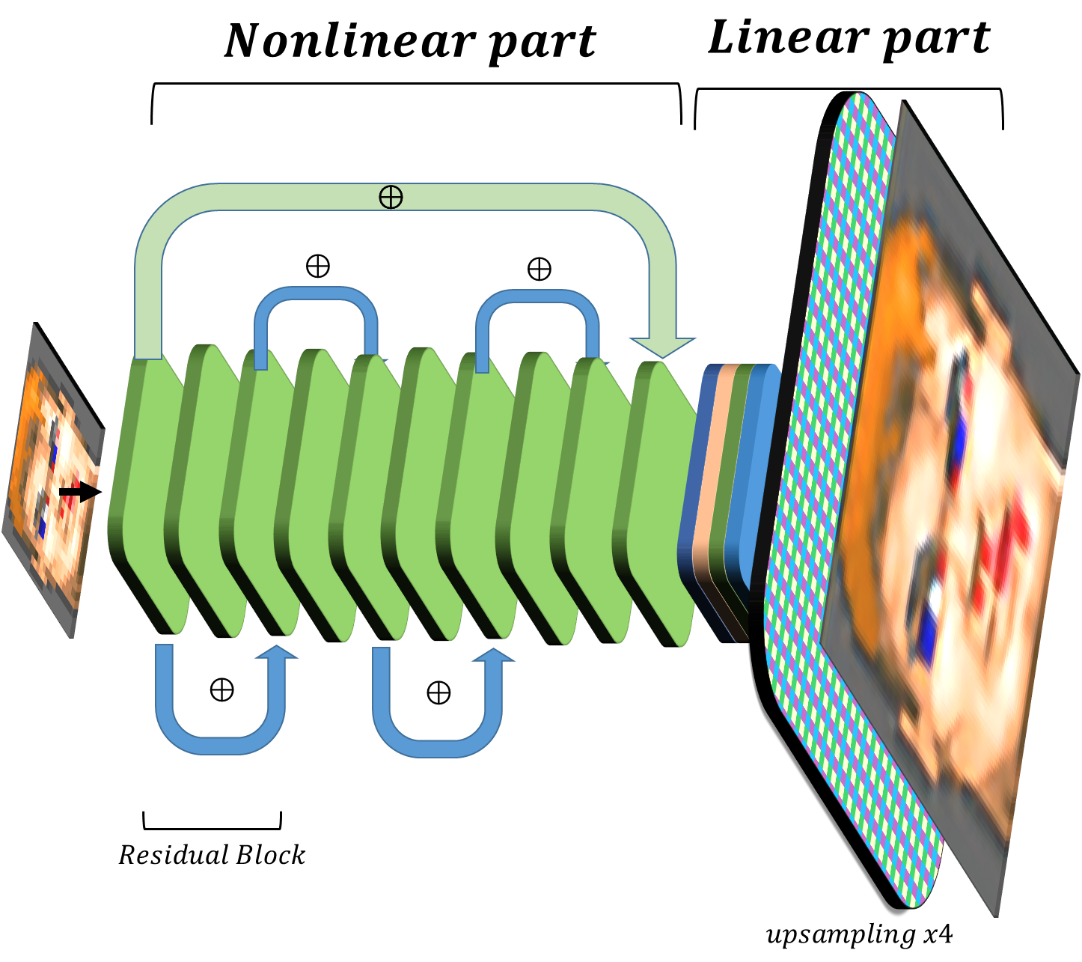
Оказалось, что такая сеть практически так же справляется с задачей superresolution, но гораздо быстрее и может быть запущена для обработки небольшого по разрешению
видео в реальном времени.
Высококачественные фото были скачаны из
data.vision.ee.ethz.ch/cvl/DIV2K. В принципе можно использовать любые фото для обучения.
import tensorflow as tf
from model import resolve_single
from model. rtsr import rtsr
import numpy as np
from utils import load_image, plot_sample
from data import DIV2K
from tensorflow.keras.optimizers.schedules import PiecewiseConstantDecay
# Model creation
rtsr_model= rtsr(scale=4, num_res_blocks=4)
#Data loading and generator creation
train_loader = DIV2K(scale=4,
downgrade='bicubic',
subset='train')
train_ds = train_loader.dataset(batch_size=16,
random_transform=True,
repeat_count=None)
valid_loader = DIV2K(scale=4,
downgrade='bicubic',
subset='valid')
valid_ds = valid_loader.dataset(batch_size=16, # use batch size of 1 as DIV2K images have different size
random_transform=True, # use DIV2K images in original size
repeat_count=40) # 1 epoch
#Saving checkpoints during training
cbcks=tf.keras.callbacks.ModelCheckpoint('callback_x4{epoch:02d}-{loss:.2f}', monitor='loss', verbose=0, save_best_only=False)
learning_rate=PiecewiseConstantDecay(boundaries=[20000], values=[1e-4, 5e-5])
#model compilation before training
rtsr_model.compile(loss='mae', optimizer=tf.keras.optimizers.Adam(learning_rate=learning_rate))
#Training
rtsr_model.fit(train_ds,validation_data=valid_ds, steps_per_epoch=3000, epochs=100, validation_steps=10,callbacks=[cbcks])
#saving weights
rtsr_model.save_weights('weights/ myedsr-lastdiv2_4block-x4_weights.h5')
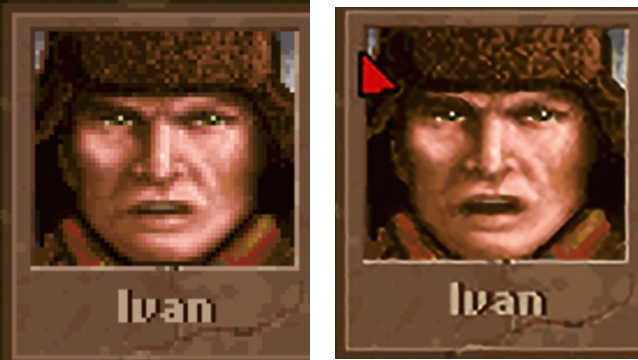
На выходе получаем относительно небольшую (2.6 МБ) нейросеть с простой архитектурой. При этом проверка дает малозаметное отличие от предобученной 16 блочной сети:

Изображение слева — исходное, справа — улучшенное при помощи 16 слойной edsr, в середине — с помощью rtsr. Разница между 2 и 3 с моей точки зрения несущественна.
Инференс
github.com/Alexankharin/RTSR
Полученную сеть запустим на видеокарте (у меня GTX 1060) с поддержкой cudnn (https://developer.nvidia.com/cudnn ) для высокой производительности.
Pipeline для инференса выглядит следующим образом:
1. Захват изображения из области или из окна
2. Улучшение изображения
3. Отрисовка улучшенного изображения в новом окне
При тестировании я обнаружил, хотя при запуске большинства игр в эмуляторе dosbox разрешение составляет 640x480 пикселей, однако чаще всего это просто увеличенные в размере пиксели разрешения 320x240(и позже нашел подробности
www.dosgamers.com/dos/dosbox-dos-emulator/screen-resolution ), что приводит ук необходимости в некоторых случаях делать downscale в 2 раза перед обработкой.
Захват скриншотов производится с использованием библиотеки mss (для OS ubuntu) или d3dshot (быстрее для windows).
Отображение — с использованием opencv-python. Для закрытия окна необходимо сделать его активным и нажать на клавишу «q». Управлением захватом улучшаемой области при помощи клавиш WSAD и IKJL.
Скрипт написан в файле superres_win.py
Результаты:
на ноутбуке с GTX 1060 (3Gb) и OS Windows10 скрипт выдает 14-15 FPS, что достаточно для квестов или стратегий, но немного маловато для платформеров. Кроме того, при запуске RTSR на стационарном ПК с OS Ubuntu и такой же видеокартой падал до 10-12 (почему — пока не разбирался). Судя по бенчмаркам
ai-benchmark.com/ranking_deeplearning_detailed.html 1080 на схожих задачах должна дать FPS около 25, что близко к оригинальным значениям и достаточно для комфортной игры. Пример улучшения графики можно увидеть на видео:
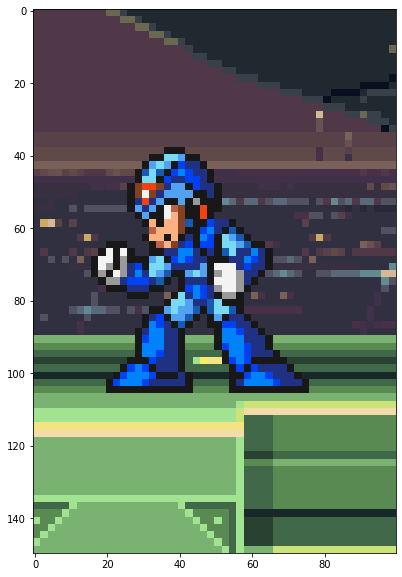
Примеры улучшения:
MegaManX:

Legend of Kyrandia


Wolf3d

Heroes of might and magic

Больше примеров можете попробовать сами
Как запустить?
Для быстрой работы необходима видеокарта с поддержкой cuda и cudnn (https://developer.nvidia.com/cuda-gpus ) и установленными библиотеками cuda/cudnn. Нужен установленный python 3.7 и tensorflow (версия выше 2.0 с поддержкой gpu). Это может быть сложной задачей, и могут возникнуть проблемы совместимости (https://www.tensorflow.org/install/source_windows ).
Простейшим способом может быть установка дистрибутива Anaconda (https://www.anaconda.com/products/individual ), а затем в установка tensorflow-gpu При помощи conda:
conda install tensorflow-gpu
Если не получится из-за конфликтов, то можно попробовать
conda install cudnn
pip install tensorflow-gpu
должно сработать.
Остальные библиотеки можно установить при помощи pip:
pip install opencv-python
pip install pywin32
pip install mss
Далее необходимо запустить скрипт командой
python superres.py
Управление окном захвата проводится при помощи клавиш wsad и ijkl (изменение размера). q- закрытие окна. 0 -включение и выключение режима superresolution. Цифры 1 и 2 — режим изображения (2 по умолчанию означает, что в игре используется увеличение за счет увеличения пикселя в 2 раза)