https://habr.com/ru/post/448702/- Python
- Программирование микроконтроллеров
MicroPython — реализация языка программирования Python для микроконтроллеров, даёт возможность аудитории этого языка, используя знакомый синтаксис и принципы программирования работать с небольшими вычислительными устройствами.
В своей работе я использую MicroPython для прототипирования, быстрой проверки идей и для создания небольших стендов. Благодаря REPL и простому синтаксису MicroPython также отлично подходит для DIY проектов и для обучения программированию.
Когда речь заходит о взаимодействии компьютеров с реальным миром, меня всегда интересует скорость их взаимодействия. В некоторых случаях использования микропроцессорной техники, например в сфере интернета вещей, скорость реакции устройства не так важна. Нет особой разницы когда включится сирена сигнализации: через 10 микросекунд после обнаружения движения или через 10 миллисекунд.
Но в некоторых аспектах, скорость работы и время реакции важно и встаёт вопрос о целесообразности использования MicroPython. Поэтому я провел небольшое исследование, на которое меня вдохновило
видео с выступления создателя MicroPython Damien George. Мне стало интересно как быстро программа, написанная на Micropython будет реагировать на входное воздействие.
Подопытным устройством будет микроконтроллер ESP8266, на плате NodeMcu с MicroPython версии esp8266-2018511-v1.9.4 на борту.
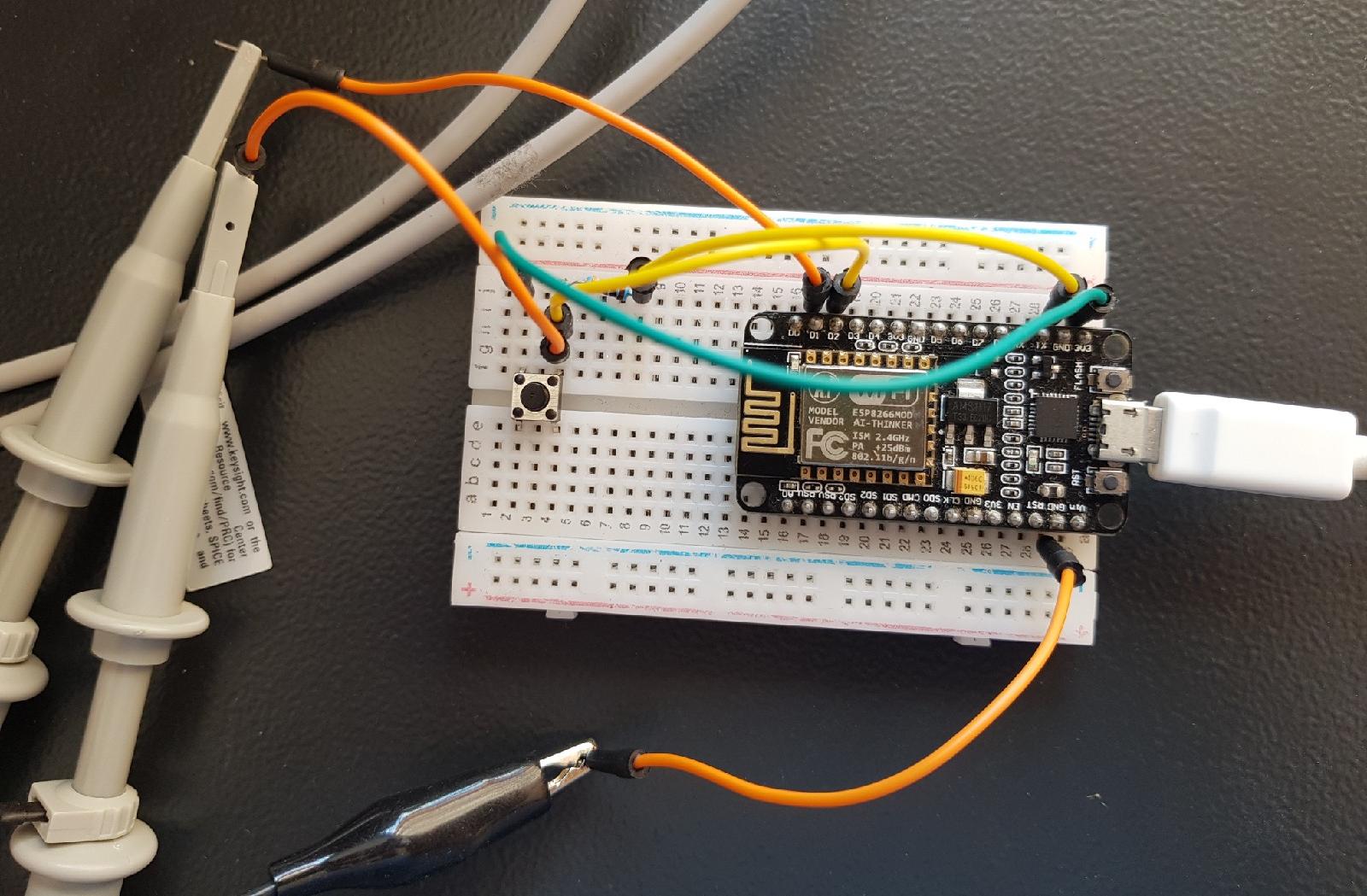
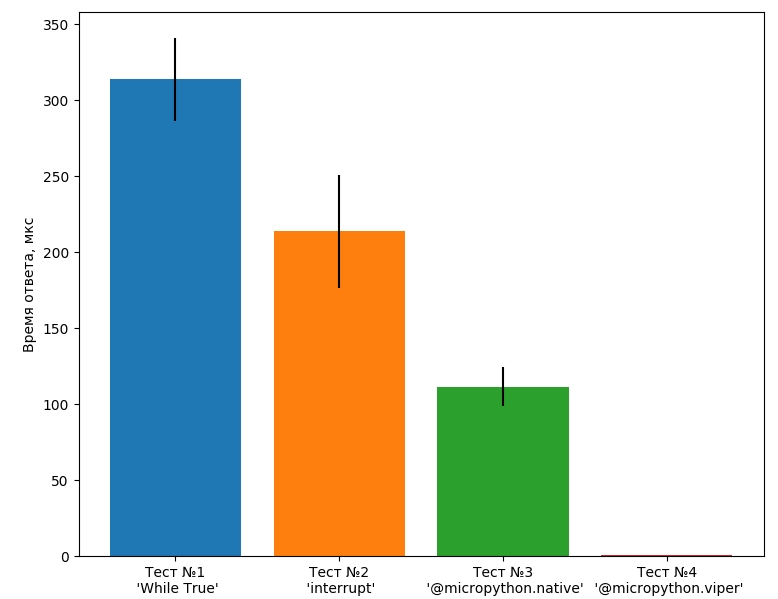
Я буду нажимать на кнопку и регистрировать на осциллографе разницу во времени между нажатием и появлением 3.3 В на другой ножке микропроцессора. Каждое измерение делается 15 раз, берётся среднее (проиллюстрировано на графиках) и рассчитывается стандартное отклонение (чёрная полоса на графиках).
Тест №1.
Если решать эту задачу «в лоб», то программа выглядит довольно тривиально:
import machine
import time
o = machine.Pin(5, machine.Pin.OUT) #D1 out
i = machine.Pin(4, machine.Pin.IN) #D2 in
while 1:
if i.value():
o.value(1)
time.sleep(0.1)
o.value(0)
Типичная осциллограмма при такой программе выглядит так:
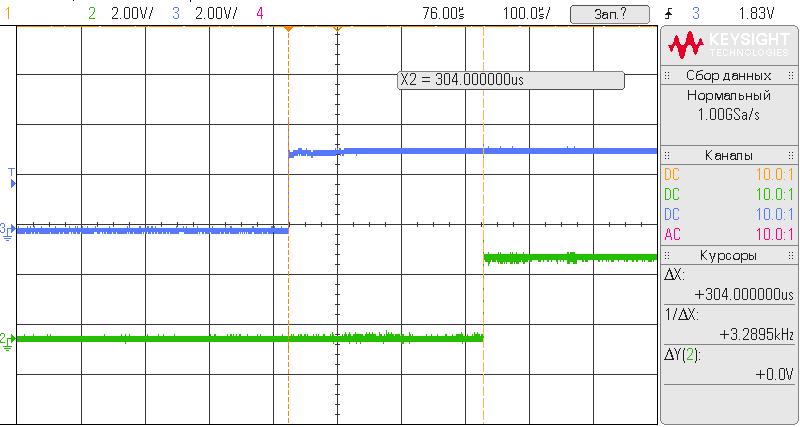
Здесь и на других осциллограммах «синий» сигнал — пин с кнопкой, «зелёный» ответный пин. При 15 повторениях получается такая картина:

В среднем время реакции около 310 микросекунд, не очень быстро, но для некоторых применений вполне приемлемо.
Тест №2
Ускорить стандартный код «из коробки» можно через обработку прерываний.
import machine
import time
o = machine.Pin(5, machine.Pin.OUT) #D1 out
i = machine.Pin(4, machine.Pin.IN) #D2 in
def f(_):
o.value(1)
time.sleep(0.1)
o.value(0)
i.irq(trigger=machine.Pin.IRQ_RISING, handler=f)
И картина получается следующая:
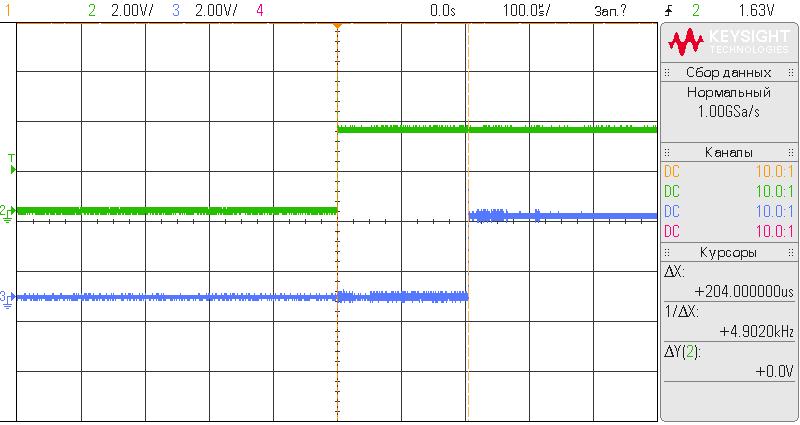
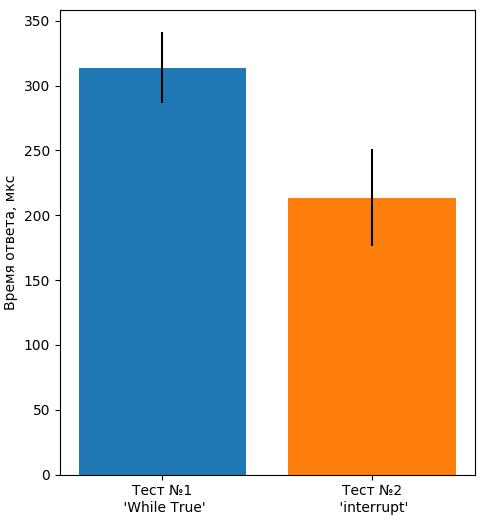
Использование прерываний даёт прирост в скорости примерно в 20%, но при этом даёт довольно большой разброс во времени ответа.
Тест №3
Если полученных скоростей не хватает, то следующий шаг — воспользоваться конструкцией @micropython.native, что даёт возможность преобразования питоновкого кода в нативный машинный код. Но при этом есть некоторые
ограничения.
Вариант кода:
import machine
import time
o = machine.Pin(5, machine.Pin.OUT) #D1 out
i = machine.Pin(4, machine.Pin.IN) #D2 in
@micropython.native
def f():
while 1:
if i.value():
o.value(1)
time.sleep(0.1)
o.value(0)
f()
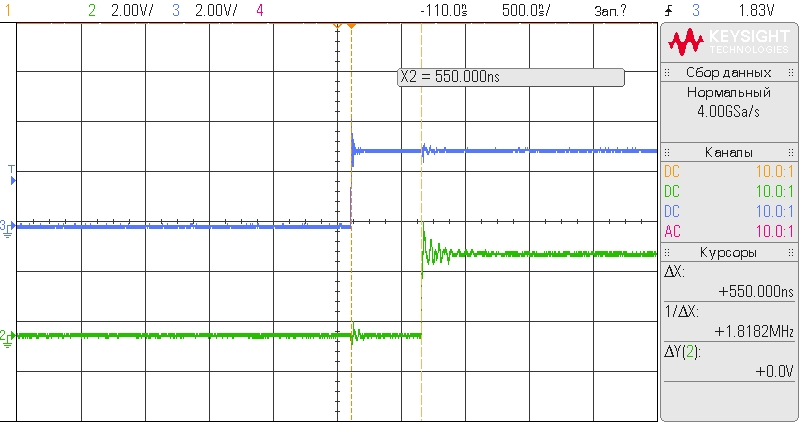
Типичная картина ответа на осциллограмме:

По сравнению с предыдущим способом ускорение почти в два раза:

Тест №4
Следующим этапом в поисках «быстрого» MicroPython — использование конструкции @micropython.viper и обращение непосредственно к регистрам микропроцессора (адреса регистров можно найти
тут.
import time
@micropython.viper
def f():
O = ptr32(0x60000300) # регистр GPIO ESP8266
while 1:
s = ((O[6] & 0x10) >> 4) # считывание информации с 4 пина
if s:
O[1] = 0x20 #активизация 5 пина
time.sleep(0.1)
O[2] = 0x20 #деактивизация 5 пина
f()
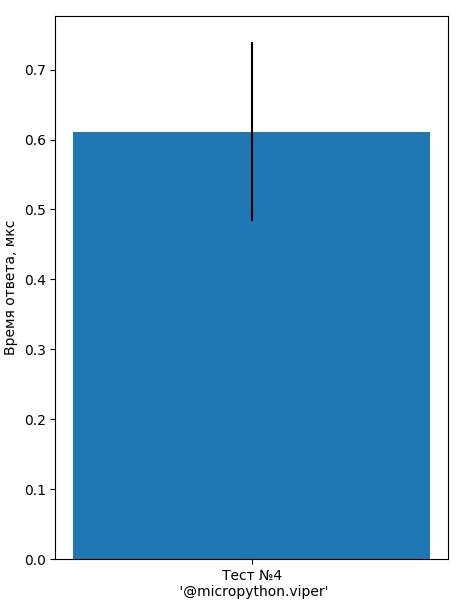
И как результат, отклик заметно ускорился:
Время отклика получается очень не большим и не поддаётся сравнению с другими способами:
Если и этого мало, то можно воспользоваться ассемблерными вставками через декоратор @micropython.asm_thumb. При таком способе питона особо не остаётся (и теряются высокоуровневые преимущества Python) и если нужны более высокие скорости лучше использовать другие аппаратные средства, например FPGA (где Python тоже может пригодиться см.
тут и
тут).
UART
В случае если есть потребность передать много информации после некоторого события можно использовать последовательный интерфейс UART.
Возьму для примера два варианта реализации.
Первый через обработку прерываний:
import machine
i = machine.Pin(4, machine.Pin.IN) #D2 in
ua = machine.UART(1)
ua.init(1000000)
def f(_):
ua.write(b'\x01')
i.irq(trigger=machine.Pin.IRQ_RISING, handler=f)
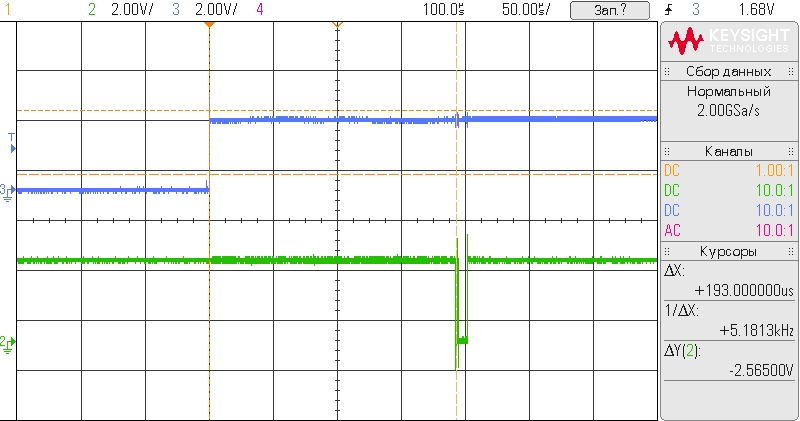
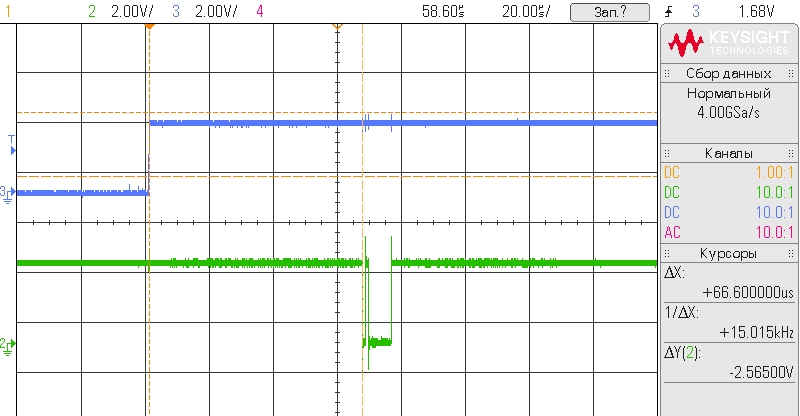
И осциллограмма реакции:
И второй тест через viper:
import machine
import time
i = machine.Pin(4, machine.Pin.IN) #D2 in
ua = machine.UART(1)
ua.init(1000000)
@micropython.viper
def f():
O = ptr32(0x60000300)
while 1:
if ((O[6] & 0x10) >> 4):
ua.write(b'\x01')
time.sleep(0.1)
f()
И осциллограмма при втором тесте:
Среднее время реакции при двух тестах:
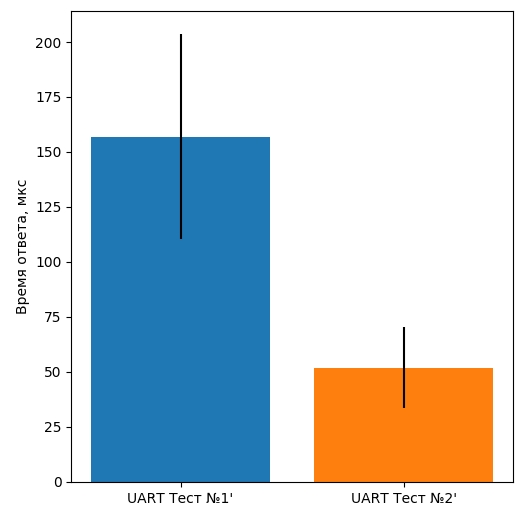
Ускорение реакции достигается за счёт более быстрого обнаружения входного воздействия во втором тесте.
Заключение
MicroPython позволяет при программировании микроконтроллеров пользоваться характерными для языков высокого уровня вещами (ООП, обработка исключений, list и dict comprahansions и пр.), а в случае необходимости заметно ускорить «классический» Python-код.