https://habr.com/ru/post/505672/- Python
- Обработка изображений
- Искусственный интеллект
- TensorFlow
После
первого опыта распознавания спортивных движений у меня зачесались руки сделать что-нибудь еще в этом направлении. Домашняя физкультура уже казалась слишком мелкой целью, так что я замахнулся на игровые виды спорта.
Применение искусственного интеллекта к спорту — недавняя тенденция, но уже есть интересные материалы:
Лично мне ближе всего волейбольная тема. По ссылке выше находится сайт одного австрийского института, где занимаются разбором игры местной любительской лиги. Есть несколько документов на почитать, но что более важно — опубликован видео-датасет, который можно свободно использовать.
Сразу скажу, что с наскока распознать элементы игры получилось с невысокой точностью, так что пришлось придержать амбиции и пилить задачу по частям. И первая часть — про самый маленький, но необходимый объект.
Распознавание движущегося мяча (aka ball tracking) — довольно популярная тема и про нее написано немало статей. Однако, в основном это демо-информация про возможности технологий, чем про применение в реальной жизни (и в реальных игровых видах спорта).
Действительно, одно дело распознать ярко-зеленый (или красный) мяч в метре от камеры и совсем другое — пестрый, крохотный (с общепринятых ракурсов), быстро двигающийся и сливающийся с фоном мяч в игре.
Я поигрался с разными видео, но в этой статье я использовал видео из указанной выше
австрийской лиги. Причина — те самые авторские права. Австрийцы выложили свои записи в открытый доступ именно для таких гиков, а вот видео с Youtube или еще откуда — как правило принадлежат какому-нибудь каналу и их использование и упоминание наверное может повлечь какие-нибудь санкции.
Австрийское видео имеет свои особенности. Главных деталей три:
- статичная камера за кортом
- Уровень игры. Уровень игры непосредственно влияет на скорость мяча, ибо у серьезных людей мяч часто можно увидеть только на замедленном повторе
- Цвет мяча, желто-синий не сильно контрастирует с цветом пола, что делает бессмысленными практически все подходы через цветовые фильтры
Начал я с того, что мяч — движется, а значит его надо искать среди движущихся объектов.
Такие объекты будем искать с помощью функций удаления фона OpenCV, добавив к ним размытие и преобразование в бинарную маску:
mask = backSub.apply(frame)
mask = cv.dilate(mask, None)
mask = cv.GaussianBlur(mask, (15, 15),0)
ret,mask = cv.threshold(mask,0,255,cv.THRESH_BINARY | cv.THRESH_OTSU)
Таким образом вот эта, например, картинка:

Превращается в такую маску:

В данном случае мяч наверху и обнаружить его довольно просто (человеческим взглядом). Переводя это на язык OpenCV — нам нужен контур, похожий на мяч, допустим еще, что это самый высокий контур на картинке.
Это коненчно не всегда так. Например, здесь верхний контур оказался плечом судьи:

Однако верхние контуры — хороший источник начальных данных от которых мы и будем отталкиваться. Собрав несколько сотен, я озаботился классификатором, который сможет отличить мяч от не-мяча.
Датасет верхнего контура выглядит разнопланово:

Но с точки зрения нейросетей представляет собой не более чем бинарную классификацию цветных картинок. Таким образом за основу модели я взял известную задачу
Котики-против-Собак.
Вариантов реализации — миллион, самая популярная архитектура — VGG, хорошо описана в
этой статье блога Keras.
Проблема в том, что картинки у меня на входе мелкие, поэтому десяток сверточных слоев тут не пойдет, поэтому пришлось выкручиться всего парой сверток и парой FC-слоев.
model = Sequential([
Convolution2D(32,(3,3), activation='relu', input_shape=input_shape),
MaxPooling2D(),
Convolution2D(64,(3,3), activation='relu'),
MaxPooling2D(),
Flatten(),
Dense(64, activation='relu'),
Dropout(0.1),
Dense(2, activation='softmax')
])
model.compile(loss="categorical_crossentropy", optimizer=SGD(lr=0.01), metrics=["accuracy"])
Как я ни крутил модель, добиться лучшег чем 20% ложно-отрицательных и 30% ложно-положительных не удалось.
Это лучше чем ничего, но конечно не достаточно.
Если применить сеть в игре, мяч как правило распознается, но появляется немало ложных мячей.

Ложные мячи бывают двух типов: они внезапно расцветают в разных частях площадки ненадолго или же нейросеть стабильно ошибается, принимая, например, за мяч голову судьи на вышке.
Но с этим надо что-то делать и на помощь приходит идея траекторий. Суть в том, что мяч в волейболе не ведет себя случайным образом, а движется по параболическим или прямым траекториям. Для простоты я использовал только прямые, но параболы очень перспективны в плане достоверности.
В общем, на коленке пришлось сделать
некий фреймворк управления траекториями.
Вот записанные траектории за розыгрыш:
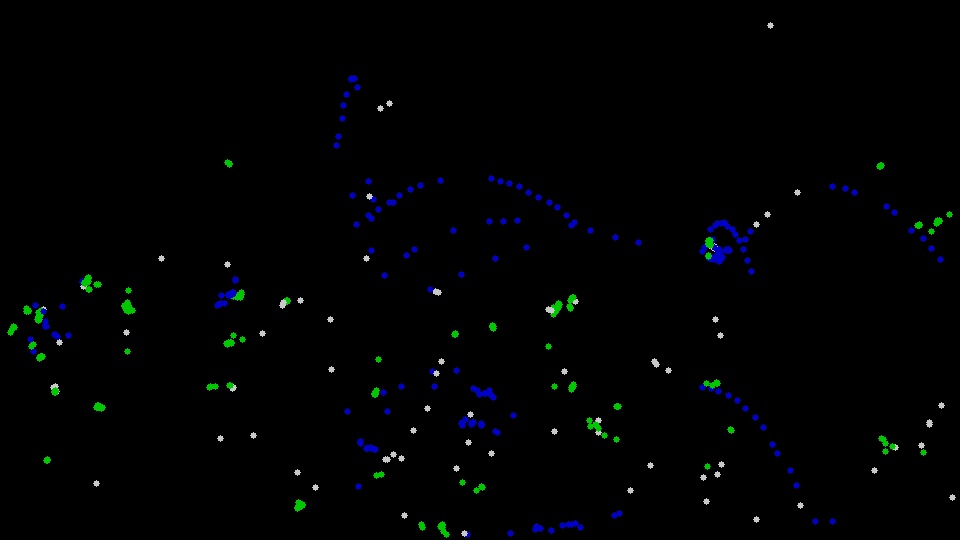
(cиним — кандидаты в траектории, зеленым — статические пятна, серым — случайные).
В этой картинке нас интересуют только синие траектории. По построению, они состоят не менее чем из трех точек и имеют направление. Направление дает большие возможности — оно позволяет предсказать, где будет мяч в следующий момент и если даже мы его не нашли — какое-то время можно пережить за счет предсказанной траектории.
Добавив еще несколько небольших деталей (например, длинные траектории имеют приоритет и могут быть предсказаны, если вдруг прервались без явного преемника), получаем вполне реалистичные розыгрыши:

Может быть можно еще выжать какие-то улучшения с помощью компьютерного зрения, однако более перспективным вариантом видится предсказание траекторий через баллистику, и следующим шагом — через смену состояний в розыгрыше (подача, прием, пас).
И в завершение еще несколько ссылок на подобные изыскания: