Проецирование положения объектов с камеры видеонаблюдения на карту, используя лишь школьную геометри
- понедельник, 14 июня 2021 г. в 00:42:20
Возможно ли превратить координаты на изображении в конкретные географические координаты? Несмотря на то, что это звучит несколько необычно, такая конвертация вполне возможна.
Сегодня я расскажу о том, как можно спроецировать координаты с плоского изображения на карту. Эта короткая статья будет своеобразным продолжением первой статьи, в которой я рассказывал о базовых возможностях Mask R-CNN.
Статья была написана в сотрудничестве с @avdosev за что ему большое спасибо.
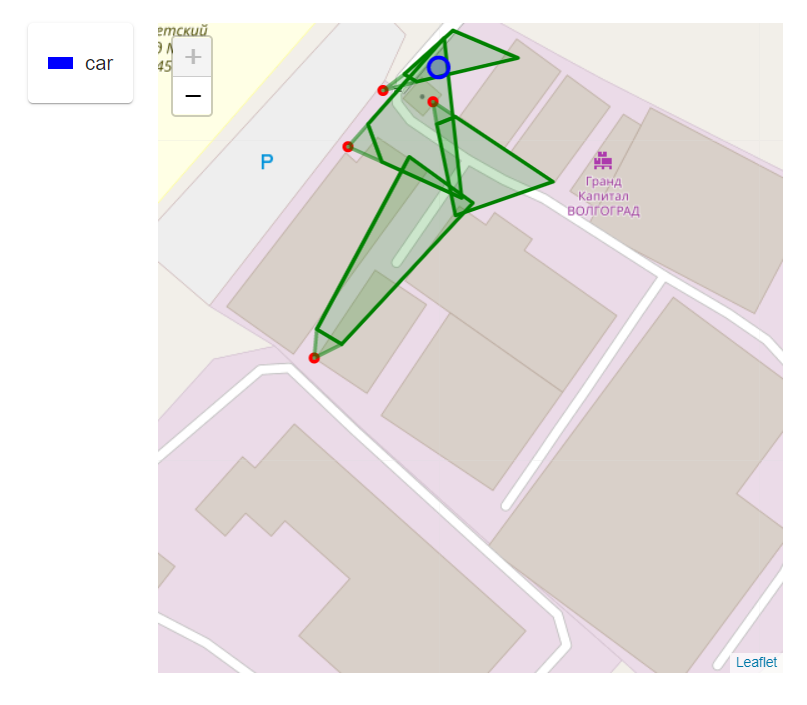
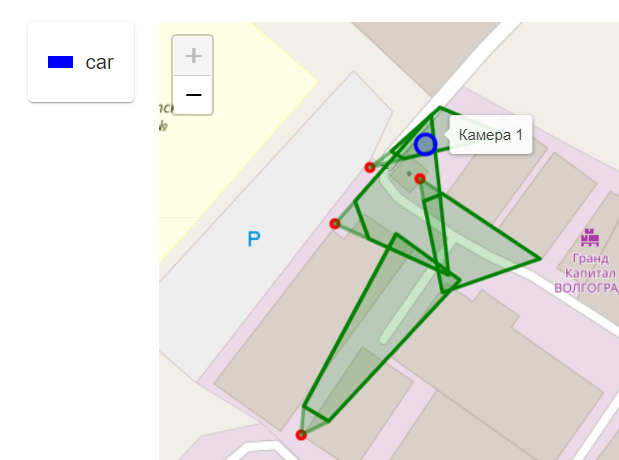
Необходимо по изображению с камеры понять, где находится объект на карте территории. Схематично это выглядит так.

На изображении каждый объект у меня вписан в прямоугольник, это не случайно, в дальнейшем мы будем с помощью этого прямоугольника получать нужный пиксель для объекта.
Также условимся, что мы рассматриваем простой случай, когда камера не пересекает стены, и мы можем представить ее область видимости при виде сверху, как трапецию.
Требования к камере:
Не должно быть рыбьего глаза.
Требование к изображению:
На изображении с камеры должна быть видна плоскость земли.
Можно задать для каждого пикселя изображения соответствующую координату местности. При необходимости узнать геокоординату, мы просто ее получим по связанному пикселю.
Достоинства:
Алгоритм будет работать быстро, мы ограничены скоростью доступа к Map структуре данных, файлу или базе данных;
Сложных вычислений в рантайме нет.
Недостатки:
Если камера сдвигается даже на миллиметр, все наши данные устаревают, и будут давать уже не точный результат;
Требуется хранить информацию о каждом пикселе для каждой камеры на территории, что нецелесообразно;
Задавать для каждого пикселя координаты слишком долго и сложно.
Исходя из этих проблем, был отброшен первый способ и продолжен поиск других.
Имея координаты углов области видимости камеры, можно вычислять координаты для подаваемого пикселя. Их можно получить двумя способами:
Посмотреть на карту территории и изображения с камеры и постараться указать наиболее точные координаты углов;
Зная параметры камеры (высота над землей, координаты камеры, угол наклона камеры и углы обзора), получить координаты углов видимости (трапеции), либо сразу вычислить координаты объекта.
Для начала стоит разобраться, как выглядит область видимости камеры на виде сверху.

Для работы с этой областью, нужно отбросить часть плоского конуса рядом с камерой, которую я обозначил красным на рисунке выше. Эта область выбирается, исходя из того, что в красную зону не могут (или не должны) попасть объекты.

Для простоты расчетов можно считать его трапецией.

Для расчета местоположения объекта используем следующие формулы.



Где
l2 , l1 – промежуточные переменные для вершины;
imageHeight, imageWidth – высота и ширина изображения с камеры в пикселях соответственно;
A, B, C, D – географические координаты вершин трапеции поля зрения камеры в формате {lat: float, lng: float};
X, Y – координаты пикселей на изображении в декартовой системе координат, являются целыми числами;
M - результирующие координаты.
В случае Full HD картинки ширина и высота будут следующими: imageHeight=1080; imageWidth=1920.
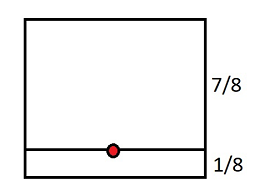
После распознавания объекта на изображении, нейросеть отдаст координаты углов прямоугольника. Из него необходимо выбрать точку на изображении, для которой будут определяться координаты. Для этого есть несколько способов:
Брать центроид прямоугольника;
Брать середину нижней стороны прямоугольника. Этот способ даст более точный результат, если объект перемещается по земле, а не летает;
Всё это можно объединить:
Взять 1/N высоты и центр по горизонтали, где N может изменяться в зависимости от различных факторов, например, типа объекта или способа перемещения.
Например, для N=8 мы получим такую результирующую точку на прямоугольнике объекта.
Все эти способы имеют существенную погрешность при малой высоте камеры или/и при большом наклоне камеры.
Для нахождения точек A, B, C, D автоматизированным образом, нам необходимо найти центр будущей трапеции C.
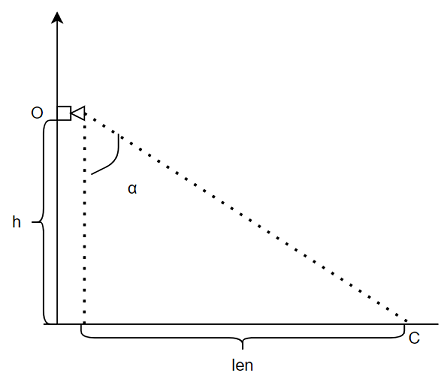
Зная высоту h и угол наклона камеры α, мы можем найти противоположный катет len.

Зная координаты камеры (точка О) и её направление (в какую сторону она смотрит, угол β) можно найти центр её наблюдения (точка С). Найти ее можно по формуле:


Измерить угол α и β на практике может быть затруднительным. Чтобы избежать сложных замеров, можно оценить примерную координату точки C (центр изображения), и вычислить углы.

Для того, чтобы найти координаты углов изображения, необходимо знать углы обзора камеры по горизонтали и вертикали. Посмотрев углы обзора в характеристиках камеры, мы можем найти координаты. Расчеты выполняются аналогично расчету центральной точки. При этом необходимо делать смещение.
Для основного угла α +/- половина угла обзора по вертикали.
Для вторичного угла β +/- половина угла обзора по горизонтали.
Примем горизонтальный угол обзора за viewAngleHorizontal, а вертикальный за viewAngleVertical.
Для точек, которые находятся ближе к камере, мы отнимем половину угла обзора, а для дальних - добавим.
Далее повторно рассмотрим точки трапеции. (Не стоит путать следующую точку C с центральной).











Скомбинировав смещения по углам обзора, мы получаем координаты углов изображения - точки A, B, C, D.
Зная точки A, B, C, D можно получить географические координаты объекта. Но можно обойтись и без них. Следующий расчет потребует imageHeight, imageWidth, X, Y.
Если добавить вспомогательные оси, где координаты X, Y будут центром, то наш пиксель поделит изображение на 4 части. Определив отношения частей по горизонтали и по вертикали, мы можем определить углы, на которые должны делать смещение. Итоговая формула выглядит так:



imageWidth = 1920 # в данном примере зададим их константами
imageHeight = 1080
import numpy as np
def geoToList(latlon):
return np.array((latlon['lat'], latlon['lng']))
def listToGeo(latlon):
return {'lat': latlon[0], 'lng': latlon[1] }
def getGeoCoordinates(A, B, C, D, X, Y):
A, B, C, D = list(map(geoToList, [A, B, C, D]))
vBC = (C - B) / imageHeight
vAD = (D - A) / imageHeight
latlonPixel1 = vBC * (imageHeight - Y) + B
latlonPixel2 = vAD * (imageHeight - Y) + A
vM = (latlonPixel2 - latlonPixel1) / imageWidth
M = vM * X + latlonPixel1
return listToGeo(M)Из этого изображения были получены координаты объекты левого верхнего и правого нижнего угла по X, Y соответственно - 613;233 1601;708.

Исходный код всегда доступен на Github.
Если найдете ошибки в алгоритме или в формулах, пожалуйста, сообщите об этом в комментариях.