https://habrahabr.ru/post/345656/- Программирование
- Алгоритмы
- Python
Эта статья — небольшая заметка о реализации алгоритма q-learning для управления агентом в стохастическом окружении. Первая часть статьи будет посвящена созданию окружения для проведения симуляций — мини-игр на поле nxn, в которых агент должен как можно дольше продержаться на удалении от противников, движущихся случайным образом. Задача противников, соответственно, его настигнуть. Очки начисляются за каждый ход, проведенный агентом в симуляции. Вторая часть статьи затронет основы q-learning алгоритма и его имплементацию. В третьей части попробуем поменять параметры, которые определяют восприятие окружения агентом. Проанализируем влияние этих параметров на результативность его игры. Акцент я специально сместил в сторону использования минимального количества сторонних модулей. Цель — прикоснуться к самой сути алгоритма, так сказать потрогать руками. Для реализации будем использовать только «pure» python 3.
Часть 1. Создание окружения
Среда, в которой действует агент, представлена двумерным полем размера n. Вот так оно выглядит:
Здесь единицей представлен агент, двойкой обозначен противник. Теперь обратимся непосредственно к коду. Переменные, которые описывают окружение: размер поля, агент, список противников.
класс окруженияclass W:
def __init__(self,n):
self.n=n
self.P=P(1,1,n)
self.ens=[EN(3,3,n),EN(4,4,n),EN(5,5,n)]
Типовой актор: агент или противник.
класс актораclass un:
def __init__(self,x,y):
self.x = x
self.y = y
def getxy(self):
return self.x, self.y
Описание aгента.
класс агентаclass P(un):
def __init__(self,x,y,n):
self.n=n
un.__init__(self,x,y)
Стратегия агента, пока пустая.
метод, вызывающий стратегию агента def strtg(self):
return 0,0
Каждый из участников симуляции может совершать ход в любом направлении, в том числе по диагонали, актор также может не перемещаться вовсе. Набор разрешенных движений на примере противника:
Благодаря движениям по диагонали противник всегда имеет возможность настигнуть агента, как бы тот ни старался уйти. Это обеспечивает конечное количество ходов симуляции для любой степени обученности агента. Запишем его возможные действия с проверкой валидности смещения. Метод принимает изменение координат агента и обновляет его положение.
метод хода агента def move(self):
dx,dy=self.strtg()
a=self.x+dx
b=self.y+dy
expr=((0<=a<self.n) and (0<=b<self.n))
if expr:
self.x=a
self.y=b
Описание противника.
класс противникаclass EN(un):
def __init__(self,x,y,n):
self.n=n
un.__init__(self,x,y)
Перемещение противника с проверкой допустимости смещения. Метод не выходит из цикла до тех пор, пока не удовлетворено условие валидности хода.
метод хода противника def move(self):
expr=False
while not expr:
a=self.x+random.choice([-1,0,1])
b=self.y+random.choice([-1,0,1])
expr=((0<=a<self.n) and (0<=b<self.n))
if expr:
self.x=a
self.y=b
Один шаг симуляции. Обновление позиции противника и агента.
метод окружения, разворачивает последующий шаг симуляции def step(self):
for i in self.ens:
i.move()
self.P.move()
Визуализация работы симуляции.
метод окружения, отрисовка поля и положения акторов def pr(self):
print('\n'*100)
px,py=self.P.getxy()
self.wmap=list([[0 for i in range(self.n)] for j in range(self.n)])
self.wmap[py][px]=1
for i in self.ens:
ex,ey=i.getxy()
self.wmap[ey][ex]=2
for i in self.wmap:
print(i)
Симуляция, основные этапы:
1. Регистрация координат акторов.
2. Проверка достижения условий завершения симуляции.
3. Старт цикла обновления ходов симуляции.
— Отрисовка окружения.
— Обновление состояния симуляции.
— Регистрация координат акторов.
— Проверка достижения условий завершения симуляции.
4. Отрисовка окружения.
метод окружения, воспроизведение последовательности симуляции def play(self):
px,py=self.P.getxy()
bl=True
for i in self.ens:
ex,ey=i.getxy()
bl=bl and (px,py)!=(ex,ey)
iter=0
while bl:
time.sleep(1)
wr.pr()
self.step()
px,py=self.P.getxy()
bl=True
for i in self.ens:
ex,ey=i.getxy()
bl=bl and (px,py)!=(ex,ey)
print((px,py),(ex,ey))
print('___')
iter=iter+1
print(iter)
Инициализация окружения и запуск.
запуск симуляцииif __name__=="__main__":
wr=W(7)
wr.play()
wr.pr()
Часть 2. Обучение агента
Метод q-learning основан на введении функции Q, отражающей ценность каждого возможного действия агента для текущего состояния, в котором сейчас находится симуляция. Или коротко:
Эта функция задает оценку агентом той награды, которую он может получить, совершив в определенный ход определенное действие. А также она включает в себя оценку того, какую награду агент может получить в будущем. Процесс обучения представляет из себя итерационное уточнение значения функции Q на каждом ходу агента. В первую очередь нужно определить величину расхождения оценки награды, которую агент получит в этот ход, с действительным значением. Запишем это в следующем виде:
Далее определим величину максимальной ожидаемой награды на последующих ходах:
Теперь следует определить, что для агента имеет большую ценность: сиюминутные награды или будущие. Данная проблема разрешается дополнительным коэффициентом при составляющей оценки последующих наград. Таким образом, значение Q на каждом последующем шаге процесса обучения будет меняться на величину:
Введем коэффициент, который будет регулировать скорость обучения агента. Тогда формула для итерационного расчета функции Q имеет вид:
Общая формула итерационного расчета функции Q:
Выделим основные признаки, которые будут составлять описание окружения с точки зрения агента. Чем обширнее набор параметров, тем точнее его реакция на изменения среды. В то же время размер пространства состояний может существенно влиять на скорость обучения.
метод агента, признаки, описывающие состояние окружения def get_features(self,x,y):
features=[]
for i in self.ens: #800-1400
ex,ey=i.getxy()
features.append(ex)
features.append(ey)
features.append(x)
features.append(y)
return features
Создание класса Q модели. Переменная gamma – коэффициент затухания, позволяющий нивелировать вклад последующих наград. Переменная alpha — коэффициент скорости обучения модели. Переменная state – словарь состояний модели.
класс Q моделиclass Q:
def __init__(self):
self.gamma=0.95
self.alpha=0.05
self.state={}
Получим состояние агента в данный ход.
метод Q модели, по запросу получает состояние агента def get_wp(self,plr):
self.plr=plr
Тренируем модель.
метод Q модели, один этап обучения модели def run_model(self,silent=1):
self.plr.prev_state=self.plr.curr_state[:-2]+(self.plr.dx,self.plr.dy)
self.plr.curr_state=tuple(self.plr.get_features(self.plr.x,self.plr.y))+(
self.plr.dx,self.plr.dy)
if not silent:
print(self.plr.prev_state)
print(self.plr.curr_state)
r=self.plr.reward
if self.plr.prev_state not in self.state:
self.state[self.plr.prev_state]=0
nvec=[]
for i in self.plr.actions:
cstate=self.plr.curr_state[:-2]+(i[0],i[1])
if cstate not in self.state:
self.state[cstate]=0
nvec.append(self.state[cstate])
nvec=max(nvec)
self.state[self.plr.prev_state]=self.state[self.plr.prev_state]+self.alpha*(-self.state[self.plr.prev_state]+r+self.gamma*nvec)
Метод получения наград. Агенту присваевается награда за продолжение симуляции. Штраф зачисляется за коллизию с противником.
метод окружения, определение размера наград def get_reward(self,end_bool):
if end_bool:
self.P.reward=1
else:
self.P.reward=-1
Стратегия агента. Производит выбор наилучшего значения из словаря состояний модели. Классу агента добавлена переменная eps, вносящая элемент случайности при выборе хода. Это делается для изучения смежных возможных действий в данном состоянии.
метод агента, выбор следующего хода def strtg(self):
if random.random()<self.eps:
act=random.choice(self.actions)
else:
name1=tuple(self.get_features(self.x,self.y))
best=[(0,0),float('-inf')]
for i in self.actions:
namea=name1+(i[0],i[1])
if namea not in self.QM.state:
self.QM.state[namea]=0
if best[1]<self.QM.state[namea]:
best=[i,self.QM.state[namea]]
act=best[0]
return act
Покажем, чему удалось научиться агенту при полной передаче информации о состоянии симуляции(абсолютные координаты агента, абсолютные координаты противника):
результат работы алгоритма(гифка ~1Мб) Часть 3. Варьируем параметры, отражающие состояние окружения для агента
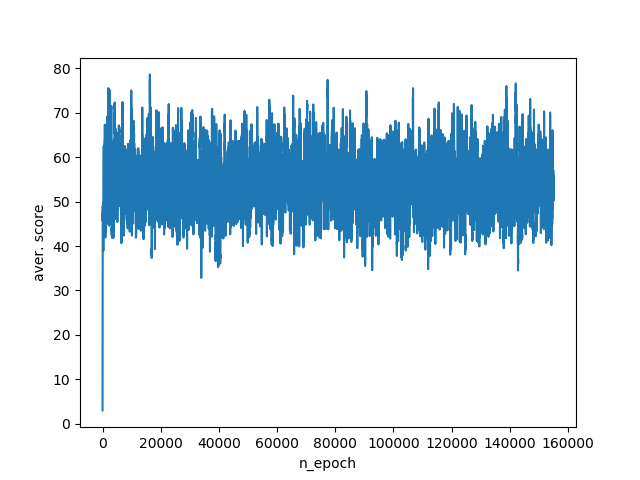
Для начала рассмотрим ситуацию, когда агенту не поступает вообще никакой информации об окружении.
features 1 def get_features(self,x,y):
features=[]
return features
В результате работы такого алгоритма агент набирает в среднем 40-75 очков за одну симуляцию. График обучения:
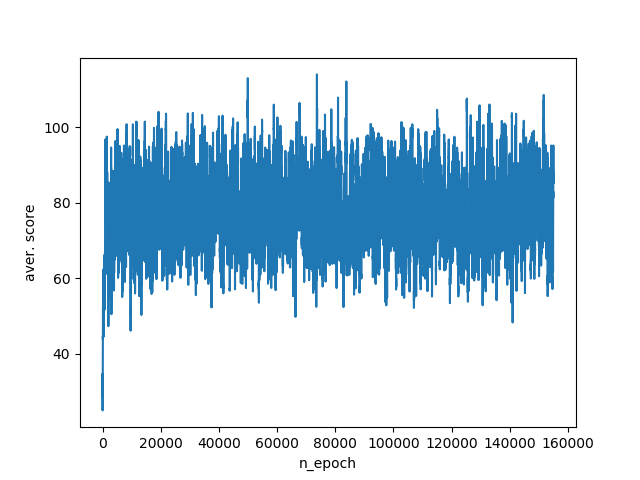
Добавим агенту данных. В первую очередь необходимо знать, как далеко находится противник. Вычислим это используя евклидово расстояние. Также важно иметь представление насколько близко агент подошел к кромке.
features 2 def get_features(self,x,y):
features=[]
for i in self.ens:
ex,ey=i.getxy()
dx=abs(x-ex)
dy=abs(y-ey)
l=hypot(dx,dy)
features.append(l)
to_brdr=min(x,y,self.n-1-x,self.n-1-y)
features.append(to_brdr)
return features
Учет этой информации поднимает нижние показатели агента на 20 очков за симуляцию и его средний счет становится в пределах 60-100 баллов. Несмотря на то, что реакция на изменения в окружении улучшилась, мы все еще теряем львиную долю необходимых данных. Так, агент до сих пор не знает, в какую сторону нужно двигаться, чтобы разорвать дистанцию с противником или отойти от края кромки. График обучения:
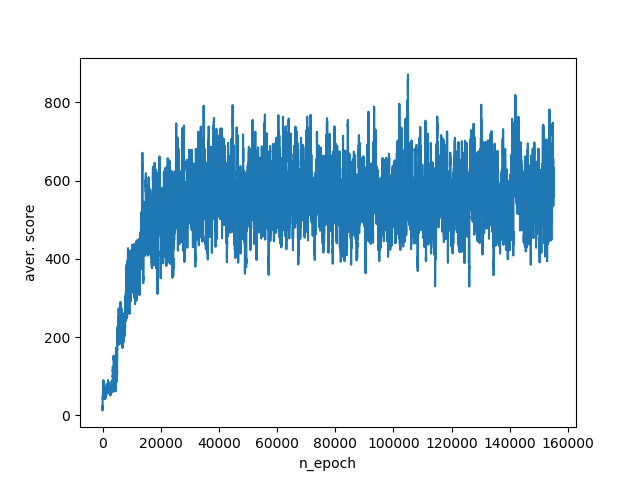
Следующий этап – добавим агенту знание, с какой стороны от него расположен противник, а также находится агент на кромке поля или нет.
features 3 def get_features(self,x,y):
features=[]
for i in self.ens:
ex,ey=i.getxy()
features.append(x-ex)
features.append(y-ey)
# if near wall x & y.
if x==0:
features.append(-1)
elif x==self.n-1:
features.append(1)
else:
features.append(0)
if y==0:
features.append(-1)
elif y==self.n-1:
features.append(1)
else:
features.append(0)
return features
Такой набор переменных сразу значительно поднимает среднее количество баллов до 400-800. График обучения:
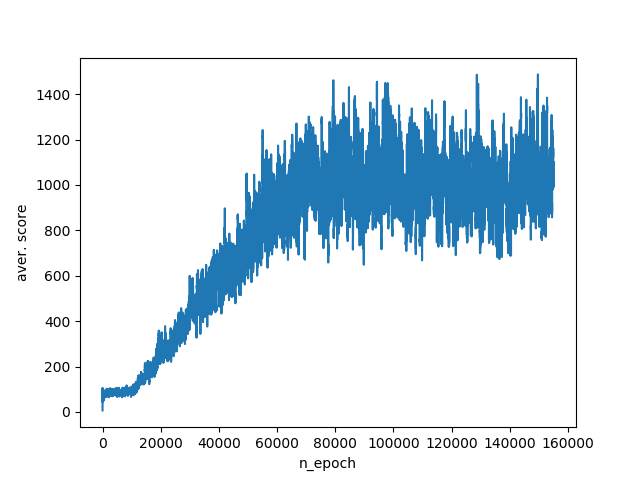
Наконец, отдадим алгоритму всю доступную информацию об окружении. А именно: абсолютные координаты агента и противника.
features 4 def get_features(self,x,y):
features=[]
for i in self.ens:
ex,ey=i.getxy()
features.append(ex)
features.append(ey)
features.append(x)
features.append(y)
return features
Этот набор параметров дает возможность агенту набирать 800-1400 очков на тестовых симуляциях. График обучения:
Итак, мы рассмотрели работу алгоритма q-learning. Покрутив параметры, которые отвечают за восприятие агентом окружения, наглядно убедились, как адекватная передача информации и учет всех аспектов при описании окружения влияет на результативность его действий. Однако у полного описания окружения есть обратная сторона. А именно взрывной рост пространства состояний при увеличении количества передаваемой агенту информации. Чтобы обойти эту проблему, были разработаны алгоритмы аппроксимирующие пространство состояний, например DQN алгоритм.
Полезные ссылки:
habrahabr.ru/post/274597ai.berkeley.edu/reinforcement.html
Полный код программ:
1. Базовая модель окружения (из части 1)import random
import time
class W:
def __init__(self,n):
self.n=n
self.P=P(1,1,n)
self.ens=[EN(3,3,n),EN(4,4,n),EN(5,5,n)]
def step(self):
for i in self.ens:
i.move()
self.P.move()
def pr(self):
print('\n'*100)
px,py=self.P.getxy()
self.wmap=list([[0 for i in range(self.n)] for j in range(self.n)])
self.wmap[py][px]=1
for i in self.ens:
ex,ey=i.getxy()
self.wmap[ey][ex]=2
for i in self.wmap:
print(i)
def play(self):
px,py=self.P.getxy()
bl=True
for i in self.ens:
ex,ey=i.getxy()
bl=bl and (px,py)!=(ex,ey)
iter=0
while bl:
time.sleep(1)
wr.pr()
self.step()
px,py=self.P.getxy()
bl=True
for i in self.ens:
ex,ey=i.getxy()
bl=bl and (px,py)!=(ex,ey)
print((px,py),(ex,ey))
print('___')
iter=iter+1
print(iter)
class un:
def __init__(self,x,y):
self.x = x
self.y = y
def getxy(self):
return self.x, self.y
class P(un):
def __init__(self,x,y,n):
self.n=n
un.__init__(self,x,y)
def strtg(self):
return 0,0
def move(self):
dx,dy=self.strtg()
a=self.x+dx
b=self.y+dy
expr=((0<=a<self.n) and (0<=b<self.n))
if expr:
self.x=a
self.y=b
class EN(un):
def __init__(self,x,y,n):
self.n=n
un.__init__(self,x,y)
def move(self):
expr=False
while not expr:
a=self.x+random.choice([-1,0,1])
b=self.y+random.choice([-1,0,1])
expr=((0<=a<self.n) and (0<=b<self.n))
if expr:
self.x=a
self.y=b
if __name__=="__main__":
wr=W(7)
wr.play()
wr.pr()
2. Модель окружения с обучением агента на 500+1500 симуляцияхimport random
import time
from math import hypot,pi,cos,sin,sqrt,exp
import plot_epoch
class Q:
def __init__(self):
self.gamma=0.95
self.alpha=0.05
self.state={}
def get_wp(self,plr):
self.plr=plr
def run_model(self,silent=1):
self.plr.prev_state=self.plr.curr_state[:-2]+(self.plr.dx,self.plr.dy)
self.plr.curr_state=tuple(self.plr.get_features(self.plr.x,self.plr.y))+(self.plr.dx,self.plr.dy)
if not silent:
print(self.plr.prev_state)
print(self.plr.curr_state)
r=self.plr.reward
if self.plr.prev_state not in self.state:
self.state[self.plr.prev_state]=0
nvec=[]
for i in self.plr.actions:
cstate=self.plr.curr_state[:-2]+(i[0],i[1])
if cstate not in self.state:
self.state[cstate]=0
nvec.append(self.state[cstate])
nvec=max(nvec)
self.state[self.plr.prev_state]=self.state[self.plr.prev_state]+self.alpha*(
-self.state[self.plr.prev_state]+r+self.gamma*nvec)
class un:
def __init__(self,x,y):
self.x = x
self.y = y
self.actions=[(0,0),(-1,-1),(0,-1),(1,-1),(-1,0),
(1,0),(-1,1),(0,1),(1,1)]
def getxy(self):
return self.x, self.y
class P(un):
def __init__(self,x,y,n,ens,QM,wrld):
self.wrld=wrld
self.QM=QM
self.ens=ens
self.n=n
self.dx=0
self.dy=0
self.eps=0.95
self.prev_state=tuple(self.get_features(x,y))+(self.dx,self.dy)
self.curr_state=tuple(self.get_features(x,y))+(self.dx,self.dy)
un.__init__(self,x,y)
def get_features(self,x,y):
features=[]
# for i in self.ens: #80-100
# ex,ey=i.getxy()
# dx=abs(x-ex)
# dy=abs(y-ey)
# l=hypot(dx,dy)
# features.append(l)
# to_brdr=min(x,y,self.n-1-x,self.n-1-y)
# features.append(to_brdr)
for i in self.ens: #800-1400
ex,ey=i.getxy()
features.append(ex)
features.append(ey)
features.append(x)
features.append(y)
# for i in self.ens: #800-1400
# ex,ey=i.getxy()
# features.append(x-ex)
# features.append(y-ey)
# features.append(self.n-1-x)
# features.append(self.n-1-y)
# for i in self.ens: #400-800
# ex,ey=i.getxy()
# features.append(x-ex)
# features.append(y-ey)
# # if near wall x & y.
# if x==0:
# features.append(-1)
# elif x==self.n-1:
# features.append(1)
# else:
# features.append(0)
# if y==0:
# features.append(-1)
# elif y==self.n-1:
# features.append(1)
# else:
# features.append(0)
# features=[] #40-80
return features
def strtg(self):
if random.random()<self.eps:
act=random.choice(self.actions)
else:
name1=tuple(self.get_features(self.x,self.y))
best=[(0,0),float('-inf')]
for i in self.actions:
namea=name1+(i[0],i[1])
if namea not in self.QM.state:
self.QM.state[namea]=0
if best[1]<self.QM.state[namea]:
best=[i,self.QM.state[namea]]
act=best[0]
return act
def move(self):
self.dx,self.dy=self.strtg()
a=self.x+self.dx
b=self.y+self.dy
expr=((0<=a<self.n) and (0<=b<self.n))
if expr:
self.x=a
self.y=b
class EN(un):
def __init__(self,x,y,n):
self.n=n
un.__init__(self,x,y)
def move(self):
expr=False
cou=0
while not expr:
act=random.choice(self.actions)
a=self.x+act[0]
b=self.y+act[1]
expr=((0<=a<self.n) and (0<=b<self.n))
if expr:
self.x=a
self.y=b
class W:
def __init__(self,n,QModel):
self.ens=[EN(n-2,n-2,n)]#,EN(n-2,n-1,n),EN(n-1,n-2,n),EN(n-1,n-1,n)]
self.P=P(1,1,n,self.ens,QModel,self)
self.n=n
self.QM=QModel
self.QM.get_wp(self.P)
def step(self):
self.P.move()
for i in self.ens:
i.move()
def pr(self,silent=1):
"""print map"""
#print('\n'*100)
px,py=self.P.getxy()
self.wmap=list([[0 for i in range(self.n)] for j in range(self.n)])
self.wmap[py][px]=1
for i in self.ens:
ex,ey=i.getxy()
self.wmap[ey][ex]=2
if not silent:
for i in self.wmap:
print(i)
def is_finished(self):
px,py=self.P.getxy()
end_bool=True
for i in self.ens:
ex,ey=i.getxy()
end_bool=end_bool and ((px,py)!=(ex,ey))
return end_bool
def get_reward(self,end_bool):
if end_bool:
self.P.reward=1
else:
self.P.reward=-1
def play(self,silent=1,silent_run=1):
end_bool=self.is_finished()
iter=0
while end_bool:
self.pr(silent)
self.step()
end_bool=self.is_finished()
self.get_reward(end_bool)
if silent_run:
self.QM.run_model(silent)
if not silent:
print('___')
time.sleep(0.1)
iter=iter+1
return iter
QModel=Q()
plot=plot_epoch.epoch_graph()
for i in range(500):
wr=W(5,QModel)
wr.P.eps=0.90
iter=wr.play(1)
wr.pr(1)
plot.plt_virt_game(W,QModel)
for i in range(1500):
wr=W(5,QModel)
#print(len(QModel.state))
wr.P.eps=0.2
iter=wr.play(1)
wr.pr(1)
plot.plt_virt_game(W,QModel)
plot.plot_graph()
print('___')
for i in range(10):
wr=W(5,QModel)
wr.P.eps=0.0
iter=wr.play(0)
wr.pr(0)
3. Модуль вывода графиков(plot_epoch.py).import matplotlib.pyplot as plt
class epoch_graph:
def __init__(self):
self.it=0
self.iter=[]
self.number=[]
self.iter_aver=[]
def plt_append(self,iter):
self.it=self.it+1
self.iter.append(iter)
self.number.append(self.it)
if len(self.iter)>100:
self.iter_aver.append(sum(self.iter[-100:])/100)
else:
self.iter_aver.append(sum(self.iter)/len(self.iter))
def plt_virt_game(self,W,QModel):
wr=W(5,QModel)
wr.P.eps=0.0
iter=wr.play(1,0)
self.plt_append(iter)
def plot_graph(self):
plt.plot(self.number,self.iter_aver)
plt.xlabel('n_epoch')
plt.ylabel('aver. score')
plt.show()