Ночью спит спокойно мама — мы собираем OpenCV для Raspbian'a
- воскресенье, 25 ноября 2018 г. в 00:17:26
Последние пару недель были непростыми для нашей команды. Выпускали OpenCV 4, а вместе с ним готовились к Intel's OpenVINO toolkit R4, в состав которого входит OpenCV. Думаешь, отвлекусь на время, посмотрю, как обычно, форумы про OpenCV, да комментарии пользователей, и тут на тебе, модно стало говорить что OpenCV не IoT, что под Raspberry Pi собрать — припоя не хватает, что на ночь make -j2 ставить — утром будет готово, если повезёт.
Поэтому предлагаю дружно взяться за руки и посмотреть, как же можно собирать библиотеку OpenCV для 32-битной операционной системы, исполняемой на ARM процессоре, используя ресурсы машины с 64-битной OS, движимой отличной архитектурой CPU. Колдовство Кросс-компиляция, не иначе!
Компиляция непосредственно на плате, принято названная нативной, действительно трудоёмка, поэтому мы здесь рассмотрим такой способ сборки проекта, который позволяет более сильным вычислительным устройствам (назовём их хостами) подготавливать бинарники для своих малых сородичей. Более того, обе машины могут иметь разные архитектуры CPU. Это и есть кросс-компиляция.
Итак, для приготовления малинового пирога с начинкой из OpenCV нам потребуются:
Весь процесс сборки OpenCV будет происходить именно на хостовой машине. У себя я использую Ubuntu. С другой версией Linux проблем с воcпроизведением возникнуть не должно. Для пользователей Windows — мои искренние пожелания не сдаваться и попробовать разобраться самим.
Своё знакомство с docker начал около недели назад, поэтому гурманам — соль и синтаксический сахар добавлять по вкусу. Нам же с тобой хватит трёх ингредиентов — Dockerfile, понятие образа и контейнера.
Сам по себе docker — инструмент по созданию и воспроизведению конфигурации любой операционной системы с необходимым набором компонент. Dockerfile — это набор shell команд, которые вы обычно используете на хостовой машине, но в данном случае — все они применяются к так называемому docker образу.
Для того, чтобы поставить docker, рассмотрим самый простой способ: закажем пакет через сервис доставки apt-get:
sudo apt-get install -y docker.ioДадим docker демону всё, что он попросит и сделаем logout из системы (замет login соответственно).
sudo usermod -a -G docker $USERRaspberry Pi (в моём случае RPI 2 Model B) в самом распространнёном приготовлении — это ARMv7 CPU с операционной системой Raspbian (Debian based). Мы же создадим docker образ на основе Ubuntu 16.04, в которую доложим кросс-компилятор, армовые библиотеки и там же соберём OpenCV.
Создаём папочку, где будет лежать наш Dockerfile:
mkdir ubuntu16_armhf_opencv && cd ubuntu16_armhf_opencv
touch DockerfileДобавим информацию о базовой OS и armhf архитектуру для установщика пакетов apt-get:
FROM ubuntu:16.04
USER root
RUN dpkg --add-architecture armhf
RUN apt-get updateОбратите внимание, команды типа FROM ..., RUN ... — это синтаксис docker и пишутся в созданном тестовом файле Dockerfile.
Вернёмся в родительскую директорию ubuntu16_armhf_opencv и попробуем создать наш docker образ:
docker image build ubuntu16_armhf_opencvВо время выполнения команды apt-get update вам должно повести увидеть ошибки следующего рода: Err:[число] [url] xenial[чего-нибудь] armhf Packages
Ign:30 http://archive.ubuntu.com/ubuntu xenial-backports/main armhf Packages
Ign:32 http://archive.ubuntu.com/ubuntu xenial-backports/universe armhf Packages
Err:7 http://archive.ubuntu.com/ubuntu xenial/main armhf Packages
404 Not Found
Ign:9 http://archive.ubuntu.com/ubuntu xenial/restricted armhf Packages
Ign:18 http://archive.ubuntu.com/ubuntu xenial/universe armhf Packages
Ign:20 http://archive.ubuntu.com/ubuntu xenial/multiverse armhf Packages
Err:22 http://archive.ubuntu.com/ubuntu xenial-updates/main armhf Packages
404 Not Found
Ign:24 http://archive.ubuntu.com/ubuntu xenial-updates/restricted armhf Packages
Ign:26 http://archive.ubuntu.com/ubuntu xenial-updates/universe armhf Packages
Ign:28 http://archive.ubuntu.com/ubuntu xenial-updates/multiverse armhf Packages
Err:30 http://archive.ubuntu.com/ubuntu xenial-backports/main armhf Packages
404 Not Found
Ign:32 http://archive.ubuntu.com/ubuntu xenial-backports/universe armhf PackagesЕсли подсмотреть в файлик /etc/apt/sources.list то каждой такой ошибке соответствует какая-то строчка, например:
Ошибка
Err:22 http://archive.ubuntu.com/ubuntu xenial-updates/main armhf Packages
404 Not FoundСтрочка в /etc/apt/sources.list:
deb http://archive.ubuntu.com/ubuntu/ xenial-updates main restrictedРешение:
Разбить на две:
deb [arch=amd64] http://archive.ubuntu.com/ubuntu/ xenial-updates main restricted
deb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ xenial-updates main restrictedТаким образом придётся заменить несколько источников пакетов. В нашем докере мы заменим их все одной командой:
RUN sed -i -E 's|^deb ([^ ]+) (.*)$|deb [arch=amd64] \1 \2\ndeb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ \2|' /etc/apt/sources.listТеперь apt-get update должен отработать без ошибок.
Нам необходимо поставить хостовые пакеты такие как git, python-pip, cmake и pkg-config, а так же crossbuild-essential-armhf, что есть набор из gcc/g++ кросс-компиляторов (arm-linux-gnueabihf-gcc и arm-linux-gnueabihf-g++) и системных библиотек соответствующей архитектуры:
RUN apt-get install -y git python-pip cmake pkg-config crossbuild-essential-armhfИз необычного — мы так же скачаем GTK (используется для рисования окошек в модуле highgui), GStreamer и Python, но уже с явным указанием инородной архитектуры:
RUN apt-get install -y --no-install-recommends \
libgtk2.0-dev:armhf \
libpython-dev:armhf \
libgstreamer1.0-dev:armhf \
libgstreamer-plugins-base1.0-dev:armhf \
libgstreamer-plugins-good1.0-dev:armhf \
libgstreamer-plugins-bad1.0-dev:armhfA дальше — клонируем и собираем, указывая нужные флаги:
RUN git clone https://github.com/opencv/opencv --depth 1
RUN mkdir opencv/build && cd opencv/build && \
export PKG_CONFIG_PATH=/usr/lib/arm-linux-gnueabihf/pkgconfig && \
cmake -DCMAKE_BUILD_TYPE=Release \
-DOPENCV_CONFIG_INSTALL_PATH="cmake" \
-DCMAKE_TOOLCHAIN_FILE="../opencv/platforms/linux/arm-gnueabi.toolchain.cmake" \
-DWITH_IPP=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
-DOPENCV_ENABLE_PKG_CONFIG=ON \
-DPYTHON2_INCLUDE_PATH="/usr/include/python2.7" \
-DPYTHON2_NUMPY_INCLUDE_DIRS="/usr/local/lib/python2.7/dist-packages/numpy/core/include" \
-DENABLE_NEON=ON \
-DCPU_BASELINE="NEON" ..где
CMAKE_TOOLCHAIN_FILE — путь к cmake файлу, который определяет процесс кросс-компиляции (выставляет нужный компилятор, ограничивает использование хостовых библиотек.
WITH_IPP=OFF, — отключаем тяжеловесные зависимости.
BUILD_TESTS=OFF, BUILD_PERF_TESTS=OFF, отключаем сборку тестов.
OPENCV_ENABLE_PKG_CONFIG=ON — чтобы pkg-config смог найти такие зависимости как GTK. PKG_CONFIG_PATH — правильный путь, где pkg-config будет искать библиотеки.
PYTHON2_INCLUDE_PATH, PYTHON2_NUMPY_INCLUDE_DIRS — пути, необходимые для кросс-компиляции обёрток для python2.
ENABLE_NEON=ON, CPU_BASELINE="NEON" — разрешаем NEON оптимизации.
OPENCV_CONFIG_INSTALL_PATH — регулирует расположение файлов в install директории.
Главное, на что стоит обратить внимание после исполнения cmake, что все необходимые модули собираются (python2, например):
-- OpenCV modules:
-- To be built: calib3d core dnn features2d flann gapi highgui imgcodecs imgproc java_bindings_generator ml objdetect photo python2 python_bindings_generator stitching ts video videoio
-- Disabled: world
-- Disabled by dependency: -
-- Unavailable: java js python3
-- Applications: tests perf_tests apps
-- Documentation: NO
-- Non-free algorithms: NOа необходимые зависимости, такие как GTK, нашлись:
-- GUI:
-- GTK+: YES (ver 2.24.30)
-- GThread : YES (ver 2.48.2)
-- GtkGlExt: NO
--
-- Video I/O:
-- GStreamer:
-- base: YES (ver 1.8.3)
-- video: YES (ver 1.8.3)
-- app: YES (ver 1.8.3)
-- riff: YES (ver 1.8.3)
-- pbutils: YES (ver 1.8.3)
-- v4l/v4l2: linux/videodev2.hОстаётся только вызвать make, make install и дождаться окончания сборки:
Successfully built 4dae6b1a7d32Изпользуйте этот id образа для того, чтобы поставить тег и создать контейнер:
docker tag 4dae6b1a7d32 ubuntu16_armhf_opencv:latest
docker run ubuntu16_armhf_opencvА нам осталось выкачать собранную OpenCV из контейнера. Сперва подсмотрим идентификатор созданного контейнера:
$ docker container ls --all
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
e94667fe60d2 ubuntu16_armhf_opencv "/bin/bash" 6 seconds ago Exited (0) 5 seconds ago clever_yalowИ скопируем install директорию с установленной OpenCV:
docker cp e94667fe60d2:/opencv/build/install/ ./
mv install ocv_installКопируем ocv_install на Raspberry Pi, устанавливаем пути и пробуем запустить OpenCV из питона.
export LD_LIBRARY_PATH=/path/to/ocv_install/lib/:$LD_LIBRARY_PATH
export PYTHONPATH=/path/to/ocv_install/python/:$PYTHONPATHЗапустим пример по детектированию, используя нейронную сеть MobileNet-SSD из https://github.com/chuanqi305/MobileNet-SSD:
import cv2 as cv
print cv.__file__
classes = ['backgroud', 'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat',
'chair', 'cow', 'diningtable', 'dog', 'horse', 'motorbike', 'person',
'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor']
cap = cv.VideoCapture(0)
net = cv.dnn.readNet('MobileNetSSD_deploy.caffemodel', 'MobileNetSSD_deploy.prototxt')
cv.namedWindow('Object detection', cv.WINDOW_NORMAL)
while cv.waitKey(1) != 27:
hasFrame, frame = cap.read()
if not hasFrame:
break
frame_height, frame_width = frame.shape[0], frame.shape[1]
blob = cv.dnn.blobFromImage(frame, scalefactor=0.007843, size=(300, 300),
mean=(127.5, 127.5, 127.5))
net.setInput(blob)
out = net.forward()
for detection in out.reshape(-1, 7):
classId = int(detection[1])
confidence = float(detection[2])
xmin = int(detection[3] * frame_width)
ymin = int(detection[4] * frame_height)
xmax = int(detection[5] * frame_width)
ymax = int(detection[6] * frame_height)
if confidence > 0.5:
cv.rectangle(frame, (xmin, ymin), (xmax, ymax), color=(255, 0, 255), thickness=3)
label = '%s: %.2f' % (classes[classId], confidence)
labelSize, baseLine = cv.getTextSize(label, cv.FONT_HERSHEY_SIMPLEX, 0.5, 1)
ymin = max(ymin, labelSize[1])
cv.rectangle(frame, (xmin, ymin - labelSize[1]), (xmin + labelSize[0], ymin + baseLine), (255, 0, 255), cv.FILLED)
cv.putText(frame, label, (xmin, ymin), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0))
cv.imshow('Object detection', frame)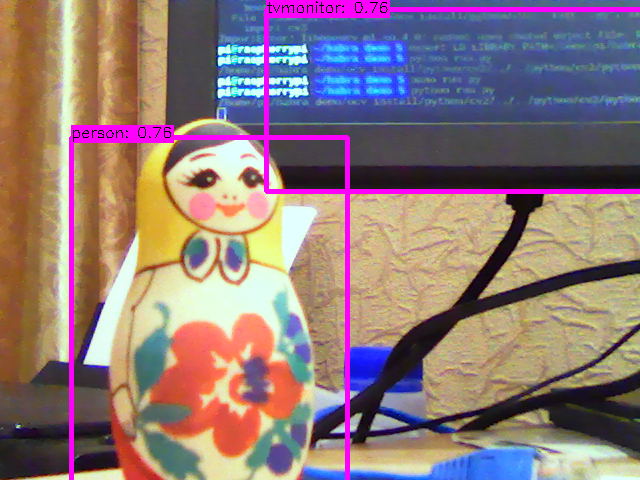
Вот и всё, полная сборка занимает не более 20 минут. Прикладываю финальный вариант Dockerfile ниже и пользуясь случаем предлагаю пройти небольшой опрос от команды OpenCV для тех кто когда-то имел опыт работы с библиотекой: https://opencv.org/survey-2018.html.
И да, поздравляю с OpenCV 4! Это не просто работа отдельной команды, это работа всего комьюнити — OpenCV 4 you.
FROM ubuntu:16.04
USER root
RUN dpkg --add-architecture armhf
RUN sed -i -E 's|^deb ([^ ]+) (.*)$|deb [arch=amd64] \1 \2\ndeb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ \2|' /etc/apt/sources.list
RUN apt-get update && \
apt-get install -y --no-install-recommends \
cmake \
pkg-config \
crossbuild-essential-armhf \
git \
python-pip \
libgtk2.0-dev:armhf \
libpython-dev:armhf \
libgstreamer1.0-dev:armhf \
libgstreamer-plugins-base1.0-dev:armhf \
libgstreamer-plugins-good1.0-dev:armhf \
libgstreamer-plugins-bad1.0-dev:armhf
RUN pip install numpy==1.12.1
RUN git clone https://github.com/opencv/opencv --depth 1
RUN mkdir opencv/build && cd opencv/build && \
export PKG_CONFIG_PATH=/usr/lib/arm-linux-gnueabihf/pkgconfig && \
cmake -DCMAKE_BUILD_TYPE=Release \
-DOPENCV_CONFIG_INSTALL_PATH="cmake" \
-DCMAKE_TOOLCHAIN_FILE="../opencv/platforms/linux/arm-gnueabi.toolchain.cmake" \
-DWITH_IPP=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
-DOPENCV_ENABLE_PKG_CONFIG=ON \
-DPYTHON2_INCLUDE_PATH="/usr/include/python2.7" \
-DPYTHON2_NUMPY_INCLUDE_DIRS="/usr/local/lib/python2.7/dist-packages/numpy/core/include" \
-DENABLE_NEON=ON \
-DCPU_BASELINE="NEON" .. && make -j4 && make install