Mask-R CNN от новичка до профессионала
- вторник, 7 января 2020 г. в 00:21:53
Однажды мне потребовалось анализировать информацию с изображения и на выходе иметь тип объекта, его вид, а также, анализируя совокупность кадров, мне нужно было выдать идентификатор объекта и время пребывания в кадре, было нужно определять как перемещался объект и в поле зрения каких камер попадал. Начнем, пожалуй, с первых двух, о анализе кадров в совокупности речь пойдет в следующей части.
Ну так распишем подробнее наши задачи:
Ок, подумал я, и взял в руки толстую змею, python, значится. Было решено использовать нейронную сетку Mask R-Cnn в связи с ее простотой и современными характеристиками. Также, разумеется, для манипуляция с изображениями будем использовать OpenCV.
Будем использовать Windows 10, из-за того, что ты вероятнее всего, используешь именно ее.
Подразумевается, что у тебя уже присутствует 64 битный Python. Если же нет, то можно скачать пакет, например, отсюда
git clone https://github.com/matterport/Mask_RCNN
cd Mask_RCNN
pip3 install -r requirements.txt
python3 setup.py installЕсли по какой-то причине не удается собрать из исходников, существует версия из pip:
pip3 install mrcnn --userК пакету, разумеется, поставятся все зависимости.
Сделаем необходимые импорты
import os
import cv2
import mrcnn.config
import mrcnn
from mrcnn.model import MaskRCNNНейросеть требует создания конфига с переопределенными полями
class MaskRCNNConfig(mrcnn.config.Config):
NAME = "coco_pretrained_model_config"
GPU_COUNT = 1
IMAGES_PER_GPU = 1
DETECTION_MIN_CONFIDENCE = 0.8 # минимальный процент отображения прямоугольника
NUM_CLASSES = 81Укажем расположение файла с весами. Пусть в данном примере он будет лежать в папке с этим файлом. Если его нет, то он скачается.
import mrcnn.utils
DATASET_FILE = "mask_rcnn_coco.h5"
if not os.path.exists(DATASET_FILE):
mrcnn.utils.download_trained_weights(DATASET_FILE)Создадим нашу модель с настройками выше
model = MaskRCNN(mode="inference", model_dir="logs", config=MaskRCNNConfig())
model.load_weights(DATASET_FILE, by_name=True)И пожалуй, начнем обработку всех изображений в каталоге images в текущей директории.
IMAGE_DIR = os.path.join(os.getcwd(), "images")
for filename in os.listdir(IMAGE_DIR):
image = cv2.imread(os.path.join(IMAGE_DIR, filename))
rgb_image = image[:, :, ::-1]
detections = model.detect([rgb_image], verbose=1)[0]Что же мы увидим в detections?
print(detections)Например, что-то похожее:
{'rois': array([[ 303, 649, 542, 1176],[ 405, 2, 701, 319]]), 'class_ids': array([3, 3]),
'scores': array([0.99896, 0.99770015], dtype=float32),
'masks': array()}В данном случае нашли 2 объекта.
rois — массивы координат левого нижнего и правого верхнего угла
class_ids — числовые идентификаторы найденных объектов, пока нам нужно знать, что 1 — человек, 3 — машина, 8 — грузовик.
scores — насколько модель уверена в решении, этот параметр можно отсеивать через DETECTION_MIN_CONFIDENCE в конфиге, отсекая все неподходящие варианты.
masks — контур объекта. Данные используются для рисования маски объекта. Т.к. они достаточно объемны, и не предназначены для понимания человеком, приводить в статье их не буду.
Ок, мы могли бы на этом остановиться, но мы же хотим посмотреть на изображение, которое обычно выдают гайды по использованию нейросеток с красиво выделенными объектами?
Проще было бы вызвать функцию mrcnn.visualize.display_instances, но мы не будем так делать, напишем свою.
Функция будет принимать изображение, и основные параметры, полученные из словаря из первых шагов.
def visualize_detections(image, masks, boxes, class_ids, scores):
import numpy as np
bgr_image = image[:, :, ::-1]
CLASS_NAMES = ['BG',"person", "bicycle", "car", "motorcycle", "bus", "truck"]
COLORS = mrcnn.visualize.random_colors(len(CLASS_NAMES))
for i in range(boxes.shape[0]):
y1, x1, y2, x2 = boxes[i]
classID = class_ids[i]
label = CLASS_NAMES[classID]
font = cv2.FONT_HERSHEY_DUPLEX
color = [int(c) for c in np.array(COLORS[classID]) * 255]
text = "{}: {:.3f}".format(label, scores[i])
size = 0.8
width = 2
cv2.rectangle(bgr_image, (x1, y1), (x2, y2), color, width)
cv2.putText(bgr_image, text, (x1, y1-20), font, size, color, width)

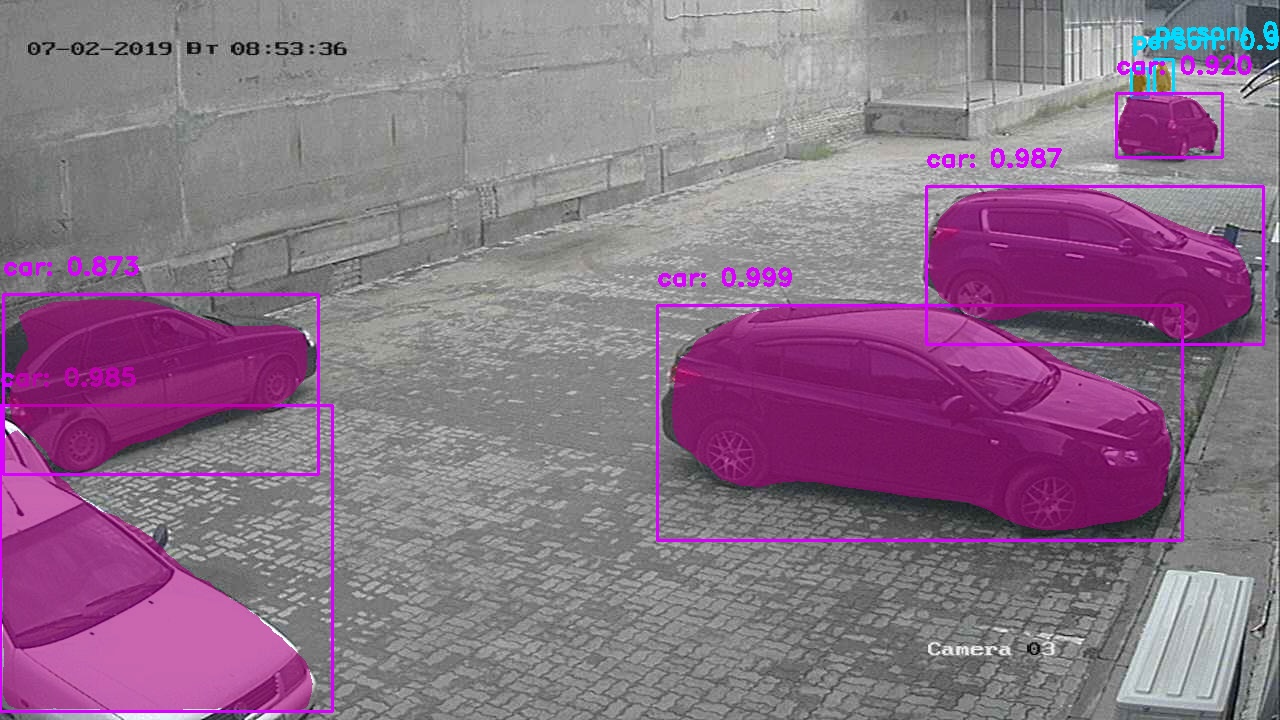
Хотя одним из основных преимуществ этой нейронной сети является решение задач Instance segmentation — получение контуров объектов, мы пока этим не воспользовались, разберем это.
Для реализации масок добавим пару строчек перед отрисовкой прямоугольника для каждого найденного объекта.
mask = masks[:, :, i] # берем срез
image = mrcnn.visualize.apply_mask(image, mask, color, alpha=0.6) # рисование маскиРезультат:
Для распознавания нам нужен четкий кадр машины вблизи, поэтому было решено брать только кадры с КПП, а потом сравнивать на похожесть(об этом в следующей главе). Этот способ, правда, дает слишком большую неточность, т.к. машины могут быть очень похожими визуально и мой алгоритм пока не может избегать такие ситуации.
Было решено использовать готовую либу от украинского производителя nomeroff-net (не реклама). Т.к. почти весь код можно найти в примерах к модели, то приводить полное описание не буду.
Скажу лишь, что эту функцию можно запускать с исходным изображением или распознанную машину можно вырезать из кадра и подать в эту функцию.
import sys
import matplotlib.image as mpimg
import os
sys.path.append(cfg.NOMEROFF_NET_DIR)
from NomeroffNet import filters, RectDetector, TextDetector, OptionsDetector, Detector, textPostprocessing
nnet = Detector(cfg.MASK_RCNN_DIR, cfg.MASK_RCNN_LOG_DIR)
nnet.loadModel("latest")
rectDetector = RectDetector()
optionsDetector = OptionsDetector()
optionsDetector.load("latest")
textDetector = TextDetector.get_static_module("ru")()
textDetector.load("latest")
def detectCarNumber(imgPath: str) -> str:
img = mpimg.imread(imgPath)
NP = nnet.detect([img])
cvImgMasks = filters.cv_img_mask(NP)
arrPoints = rectDetector.detect(cvImgMasks)
zones = rectDetector.get_cv_zonesBGR(img, arrPoints)
regionIds, stateIds, _c = optionsDetector.predict(zones)
regionNames = optionsDetector.getRegionLabels(regionIds)
# find text with postprocessing by standart
textArr = textDetector.predict(zones)
textArr = textPostprocessing(textArr, regionNames)
return textArrtextArr на выходе будет представлять массив строк с номерами машин, найденных на кадре, например:
["К293РР163"], или [""], [] — если подходящие номера не были найдены.
Теперь нам нужно понять как фиксируя объект однажды, понимать, что это именно он на соседнем кадре. На данном этапе будем считать, что у нас всего лишь одна камера и будем различать только разные кадры с нее.
Для этого нужно узнать как мы будем проводить сравнение двух объектов.
Предложу для этих целей sift алгоритм. Оговоримся, что он не входит в основную часть OpenCV, поэтому нам необходимо доставить contrib модули дополнительно. К сожалению, алгоритм запатентован и его использование в коммерческих программах ограничено. Но мы нацелены на научно-исследовательскую деятельность, не так ли?
pip3 install opencv-contrib-python --user~~ Перегружаем оператор == ~~ Пишем функцию, принимающую 2 сравниваемых объекта в виде матриц. Например, мы их получаем после вызова функции cv2.open(path)
Напишем реализацию нашего алгоритма.
def compareImages(img1, img2) -> bool:
sift = cv2.xfeatures2d.SIFT_create()Находим ключевые точки и дескрипторы с помощью SIFT. Пожалуй, хелп для этих функций приводить не буду, ведь его всегда его можно вызвать в интерактивной оболочке как help(somefunc)
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)Настроим наш алгоритм.
FLANN_INDEX_KDTREE = 0
indexParams = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
searchParams = dict(checks=50)
flann = cv2.FlannBasedMatcher(indexParams, searchParams)Теперь запустим его.
matches = flann.knnMatch(des1, des2, k=2)Посчитаем сходства между изображениями
matchesCount = 0
for m, n in matches:
if m.distance < cfg.cencitivity*n.distance:
matchesCount += 1
return matchesCount > cfg.MIN_MATCH_COUNTА теперь, попробуем его использовать
Для этого, после обнаружения объектов, нам нужно их вырезать с исходного изображения
Я не смог написать ничего лучше, чем сохранить на медленную память, а потом уже оттуда считывать.
def extractObjects(objects, binaryImage, outputImageDirectory, filename=None):
for item in objects:
y1, x1, y2, x2 = item.coordinates
# вырежет все объекты в отдельные изображения
cropped = binaryImage[y1:y2, x1:x2]
beforePoint, afterPoint = filename.split(".")
outputDirPath = os.path.join(os.path.split(outputImageDirectory)[0], "objectsOn" + beforePoint)
if not os.path.exists(outputDirPath):
os.mkdir(outputDirPath)
coordinates = str(item).replace(" ", ",")
pathToObjectImage = "{}{}.jpg".format(item.type, coordinates)
cv2.imwrite(os.path.join(outputDirPath, str(pathToObjectImage)), cropped)Теперь у нас есть объекты в каталоге <outputImageDirectory>/objectsOn<imageFilename>
Теперь, если у нас есть как минимум 2 таких каталога, то мы можем сравнивать объекты в них. Запустим функцию, написанную ранее
if compareImages(previousObjects, currentObjects):
print(“Эти объекты одинаковы!”)Или мы можем сделать другое действие, вроде маркировки этих объектов одинаковым айдишником.
Конечно, как и все нейронные сети, эта склонна давать иногда ошибочные результаты.
В целом, мы выполнили 3 задачи, поставленные в начале, так что будем закругляться. Я сомневаюсь, что эта статья открыла глаза людям, которые написали хотя бы одну программу, решающую задачи image recognition/image segmentation, но я надеюсь, что я помог хотя бы одному начинающему разработчику).
Полный исходный код проекта можно посмотреть тут.