http://habrahabr.ru/post/248181/
Привет Хабр.
Люблю стрелковое оружие и стрельбу. Однако в домашних условий это плохое хобби. Нет, ну можно конечно купить травмат и изрешетить квартиру, но, думаю, домашние этого не оценят. Не желая мирится с этим, решил реализовать свой, в меру безопасный домашний тир. Если заинтересовал — добро пожаловать под кат.

Идеи, как это можно реализовать, витали в голове давно. Вот несколько забракованных:
— пистолет с фототранзистором + экран монитора. Подсвечивая половину/четверть/одну восьмую/и т.д. экрана, проверяем ответ от фототранзистора и итеративно уточняем часть экрана, в которую направлен пистолет. Идею забраковал из-за низкой частоты обновления мониторов и их инерционности.
— пистолет с фототранзистором + экран из светодиодных матриц. Уже лучше, можно обновлять изображение на диодной матрице с достаточной частотой. Даже начал спаивать диодные матрицы, но вовремя одумался.
— пистолет с камерой, несколько лазерных светодиодов, образующих метки на стене, по которым камера определяет свое положение. В принципе идея была не плоха. Однако прикинув, как будет смотреться пистолет с прикрученной к нему вебкамерой, так же от нее отказался.
Ну и финальная идея — статическая камера, смотрящая на стену и пистолет с лазером. Идея есть, дело за реализацией.
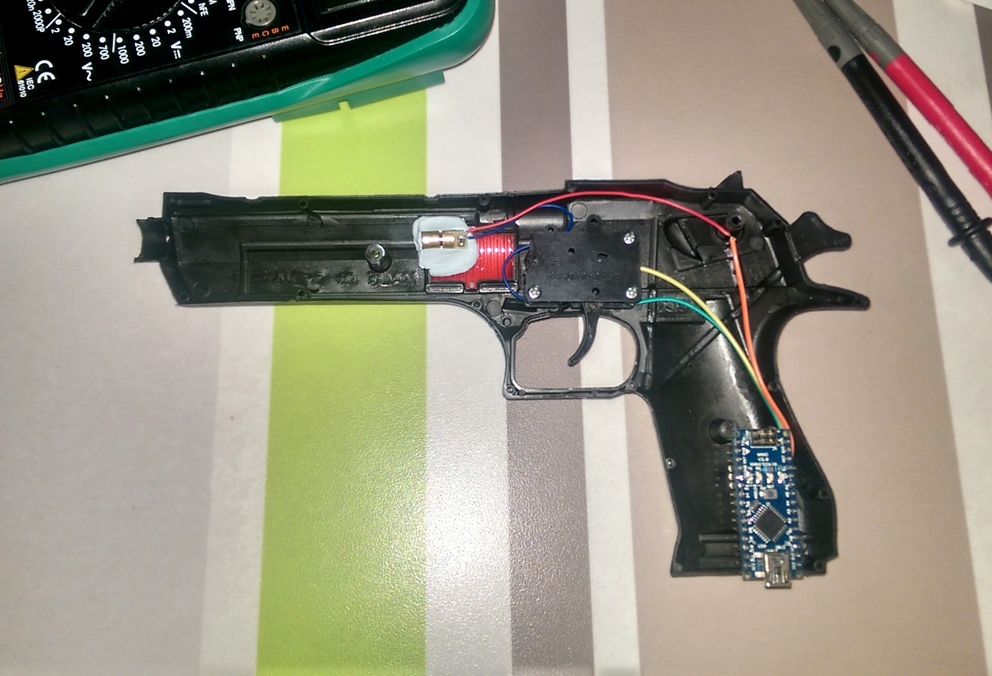
Купил первый попавшийся детский пистолет(Desert Eagle калибра 50). Выкинул внутренности, обработал напильником и установил в него лазерный диод, кнопку на спусковой крючок и ардуинину nano. Нет, можно конечно поставить туда в место ардуинины конденсатор, так что бы он кнопкой переключался с источника питания на диод и обратно, но это не достаточно гибкий подход. Лазерный диод приклеил на холодную сварку. Пока она застывала, аккуратно корректировал включенный диод, совмещая с прицельной планкой.
Написал простейший скетч:
Скрытый текстvoid setup() {
pinMode(3, OUTPUT);//LED
pinMode(2, INPUT);//Button to ground
digitalWrite(2, true);
}
int t = 10000;
bool PreButton = false;
void loop() {
bool Button = !digitalRead(2);
if (PreButton == false && Button == true && t > 500) t = 0;
if (t<5) digitalWrite(3, true);
else digitalWrite(3, false);
if (t<10000) t++;
PreButton = Button;
delay(1);
}
Пистолет «стреляет» короткими импульсами по 4мс (подобрал в процессе настройки) с максимальной скорострельностью 2 выстрела в секунду.
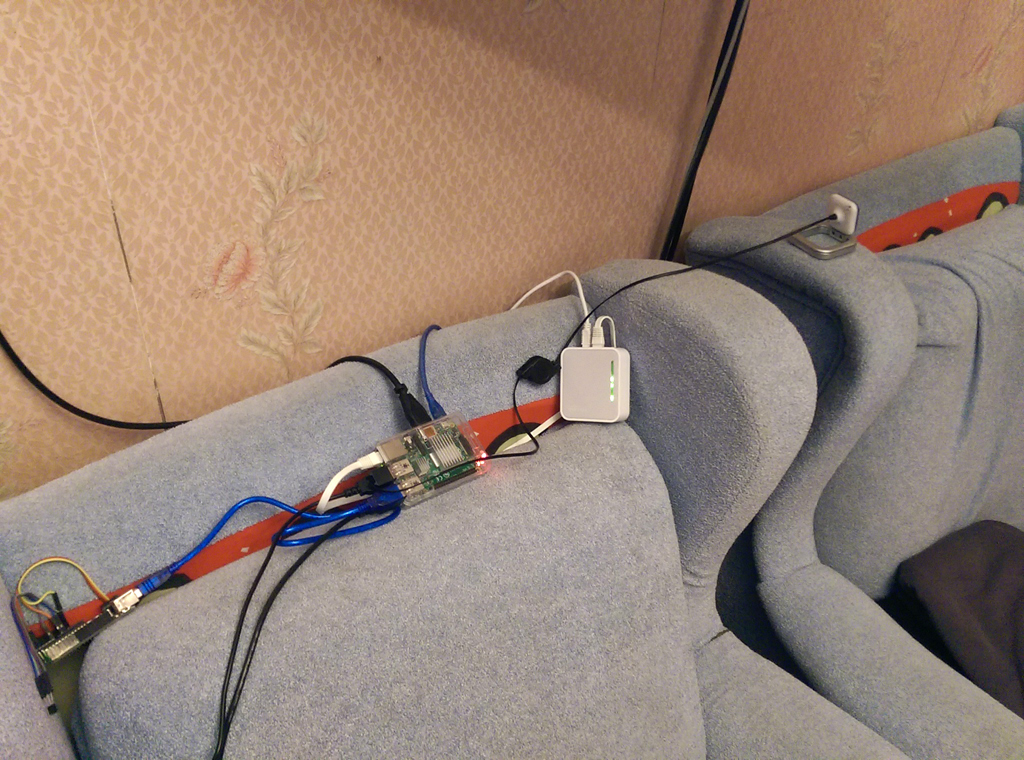
Далее дело за приемной стороной. Купил простейшую вебкамеру. Малинка уже была в закромах. Подключил камеру, направил на стену.
Далее нужно поставить на малинку необходимые пакеты
sudo apt-get install libv4l-0 libopencv-dev python-opencv
Осталось написать питоновский скрипт. Это был мой первый скрипт на питоне, по этому пришлось убить на него почти день.
Скрытый текст#!/usr/bin/python
import sys
import cv2
import math
import subprocess
if __name__ == '__main__':
#target in camera
CenterX = 426.5
CenterY = 190.5
Radius = 40.0
width = 800
height = 640
capture = cv2.VideoCapture(0)
capture.set(3, width);
capture.set(4, height);
image = cv2.imread("target.jpg", cv2.CV_LOAD_IMAGE_COLOR)
target_x = float(image.shape[0])*0.5
target_y = float(image.shape[1])*0.5
target_Radius = min(target_x,target_y)
target = image.copy()
cv2.namedWindow("Result", 1)
cv2.imshow("Result", target)
ShotCount = int();
Scoore = 0;
while 1:
if cv2.waitKey(1) >= 0:
break
ret,frame = capture.read()
grey_image = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
ret,grey_image = cv2.threshold(grey_image, 245, 255, cv2.THRESH_BINARY)
# grey_image = cv2.erode(grey_image, None, iterations = 1)
# grey_image = cv2.dilate(grey_image, None, iterations = 1)
(contour, _) = cv2.findContours(grey_image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if contour:
subprocess.Popen('aplay Shot.wav', shell = True)
cntr = sorted(contour, key = cv2.contourArea, reverse = True)[0]
(x,y), radius = cv2.minEnclosingCircle(cntr)
center = (x, y)
shot_x = (float(x) - CenterX)/Radius
shot_y = (float(y) - CenterY)/Radius
dist = math.sqrt(shot_x*shot_x+shot_y*shot_y)
shot_x = target_x + shot_x*target_Radius
shot_y = target_y + shot_y*target_Radius
Shot = (int(shot_x), int(shot_y))
cv2.circle(target, Shot, 5, (60,60,255),10)
cv2.circle(target, Shot, 10, (120,120,120),1)
cv2.imshow("Result", target)
#calibrate
#print (center, dist)
print ("Shots", ShotCount+1)
if dist < 1.0:
Scoore += 1 - dist
ShotCount += 1
if ShotCount > 6:
ShotCount = 0;
Scoore = Scoore/7.0*100.0
print("You Scoore: ", Scoore)
Scoore = 0
target = image.copy()
cv2.waitKey(300)
subprocess.Popen('aplay 924.wav', shell = True)
cv2.waitKey(1000)
cv2.waitKey(50)
cv2.destroyAllWindows()
Немного пояснений. Скрипт делает снимки с камеры и преобразует их в черно-белые. Далее отсекает все что темнее 245. Как показала практика пятно лазерного диода детектируется очень уверенно даже при длине импульса всего пару миллисекунд. Далее находим контур пятна и минимальную окружность, его описывающую. Рисуем попадания на мишени, проигрываем звук. После семи «выстрелов» подсчитываем очки (коих можно набить максимум 100).
Перед стрельбой нужно откалибровать положение мишени в камере.
Кстати «мишень»:
У меня камера стоит в трех метрах от мишени. Раскомментируем строку #print (center, dist), стреляем, пока не попадем точно в центр. Смотрим в логе позицию попадания и прописываем в начало скрипта (CenterX, CenterY). Так же там правим Radius под свой размер мишени.
Разрешающая способность камеры с трех метров порядка двух миллиметров. Если этого покажется мало, можно просто придвинуть камеру.
Все,
впадаем в детство приступаем к занятиям по огневой подготовке.
Процесс выглядит так (сори за обшарпанные обои — живу на съемной квартире):
Исходники к проекту:
github.com/DIMOSUS/Laser-shoting
Не забываем про безопасность — на лазер, как и в телескоп на солнце, можно посмотреть только два раза…
В будущем хотелось бы установить в пистолет сервомашинку, которая будет дергать груз для симуляции отдачи. Ну и распечатать нормальную мишень.