https://habr.com/post/428936/- Биотехнологии
- Искусственный интеллект
- Разработка робототехники
- Робототехника
Эволюция – это путешествие. С одной стороны, это вроде бы простой механизм – особи, лучше приспособленные к окружающей среде, рожают больше детей, а меньше приспособленные не размножаются так сильно, и их гены отфильтровываются. С другой стороны, она смогла породить потрясающий набор организмов. Некоторые животные летают при помощи оперённых крыльев, другие при помощи мембран, растянутых между пальцами. Некоторые бегают на двух ногах, другие на четырёх. И все по-своему адаптировались к своему окружению.
Эволюция – штука мощная, и к этой силе за вдохновением сегодня обращаются специалисты по робототехнике. Новое концептуальное исследование австралийских учёных изучает вопрос того, как эволюционные алгоритмы могут порождать ноги для роботов, приспособленные для ходьбы по определённым поверхностям. Результаты получились одновременно логичными, контринтуитивными и странными – а также намекают на новый способ изготовления ходячих машин.
Исследователи начали с 20 случайных форм цифровых ног, ограниченных определённым размером (трёхметровые ноги из кошмаров нам не нужны). Каждая схема базируется на элементах, известных, как
кривые Безье. «Кривую Безье можно увидеть в Microsoft Paint, где вы определяете кривую по нескольким контрольным точкам, только мы используем их в трёх измерениях», — говорит исследователь Дэвид Говард из Австралийской общественной организации научных и промышленных исследований. Система проецирует эти кривые на решётку из трёхмерных пикселей –
вокселей. «В том месте, где кривая пересекается с вокселем, мы размещаем наш материал, — добавляет Говард. – Всё остальное остаётся пустым». В результате каждая схема становится уникальной.
Симуляция изучает приспособленность полученной ноги для ходьбы по трём разных поверхностям: твёрдой почве, гравию и по воде. Просто вместо выбора таких свойств, как хорошее зрение или камуфляж, как происходит при естественном отборе, система выбирает схемы по крутящему моменту, который пришлось бы развивать мотору, чтобы вращать ногу определённой длины при ходьбе по заданной поверхности. Иначе говоря, хорошая нога – энергетически эффективная нога. Также бонусы давали за ноги, требовавшие меньше материала.
«Для гравийной поверхности, по которой идёт нога, мы вычисляем силы, действующие на каждый камушек, — говорит Говард. – Это даёт нам очень точное представление на то, что нога делает в окружающей среде». То же происходит с водой и твёрдой почвой.
Затем исследователи взяли 20 изначальных ног и скомбинировали их с теми, что показали себя лучше всего. Выбрали наиболее приспособленные ноги для создания дочерних ног, немного похожих на родительские. «Мы просто делаем это снова и снова», — говорит Говард. В течение тысячи поколений. В результате половина популяции, показавшая наихудшие результаты, исчезла, как исчезают в природе животные под воздействием факторов окружающей среды. «А затем мы применяем автоматическую адаптацию к окружающей среде».

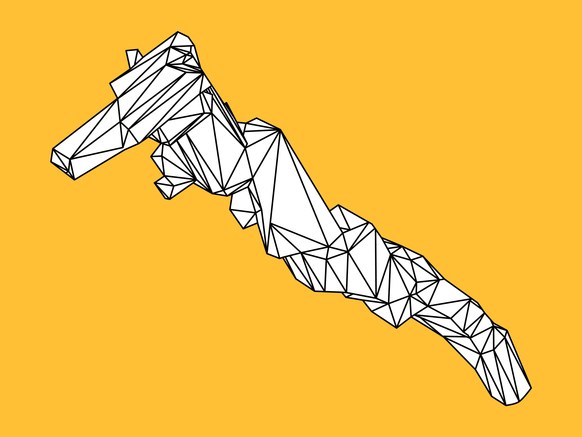
На изображении выше в первом ряду расположены ноги, которые алгоритм посчитал наиболее эффективными для ходьбы по твёрдой поверхности. Средний ряд предпочтителен для гравия, нижний – для воды.
Похожие на лезвия ноги – логичный выбор для ходьбы по твёрдой земле. Поскольку она твёрдая, узкие ноги не будут проваливаться. «Поэтому ноги для гравия получились потолще, им нужны более широкие следы», — сказал Говард. Они помогают ногам ходить по гравию, не проваливаясь, как снегоступы.
Толстые ноги, адаптированные для воды? Это пока загадка. «С водой получилось что-то странное, мы ожидали чего-то, похожего на лезвия, как для ходьбы по твёрдой поверхности», — сказал Говард. Это позволило бы им рассекать воду. Также можно было бы ожидать от системы более худых конечностей, учитывая все первоначальные задачи. «Но узких ног не получилось. Мы пока ещё не совсем уверены, почему».
Также довольно странными получились некоторые выступы, особенно на ногах, предназначенных для почвы. «Нам нравится теория, по которой у них есть своя цель, — говорит Говард. Но на самом деле при разметке кривой Безье на воксельную решётку, её часть, которая кажется бесполезной, на самом деле является частью гораздо большей кривой, обеспечивающей структуру внутри ноги». Выступы выглядят брутально, но на самом деле, они – всего лишь артефакты, не помогающие, но и не мешающие ногам. Говард с коллегами подстроили систему так, чтобы она их распознавала и удаляла автоматически.
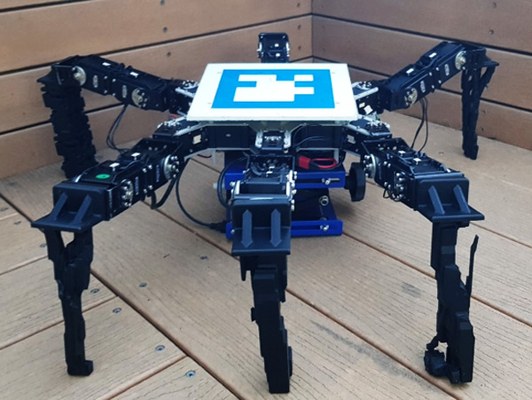
Исследователи распечатали такие ноги на 3D-принтере, и подсоединили их к шестиногому роботу. Теперь они планируют проверить их эффективность на реальной поверхности по сравнению с ногами, разработанными людьми. Команда уже загрузила в симулятор примеры таких ног, и получилось, что полученные в результате «эволюции» ноги выступают не хуже, а иногда и лучше искусственных.
Зачем же нужно тратить усилия на симуляцию эволюции роботов? Например, можно придать роботу узкую специализацию для перемещения по определённой поверхности, а не основываться на ногах широкого применения. Теоретически, это позволит роботу лучше справляться в определённых ситуациях, например, при преодолении песчаных дюн.
«Если вы хотите использовать робота в другом окружении, можно просто заново запустить алгоритм», — говорит Тоннес Нигаард, изучающий меняющих форму под влиянием эволюции роботов в Университете Осло, и не принимавший участия в этой работе. «Если вы разработали систему, специально предназначенную для определённой цели, то на поздних этапах проектирования это уже может оказаться невозможным».
Система Нигаарда, четырёхногий робот с телескопическими ногами, эволюционирует на ходу. Методом проб и ошибок – то есть, часто падая – он учится ходить по, например, ледяной поверхности, укорачивая ноги для занижения центра тяжести. В помещении он может удлинить их, чтобы увеличить длину шага и повысить эффективность передвижения. Возможно, удастся скомбинировать две этих технологии: использовать симуляцию для разработки подходящего дизайна ног, а затем встроить его в реальную машину, способную изменяться.
И если у эволюции что и получается хорошо делать, так это удивлять. «Эволюция ищет ответы в гораздо более широком спектре вариантов, — говорит Говард. – Ей всё равно, как выглядит получившаяся вещь. Она может выглядеть совершенно контринтуитивно, не так, как придумал бы инженер-человек. Но если это работает – больше ничто не имеет значения».